Publications
For the up-to-date publication list, please visit the Google Scholar page.
* Equal contribution. † Equal advising.
2026
Pretrained Vision-Language-Action Models are Surprisingly Resistant to Forgetting in Continual Learning
International Conference on Machine Learning (ICML), July 2026
Oral Presentation
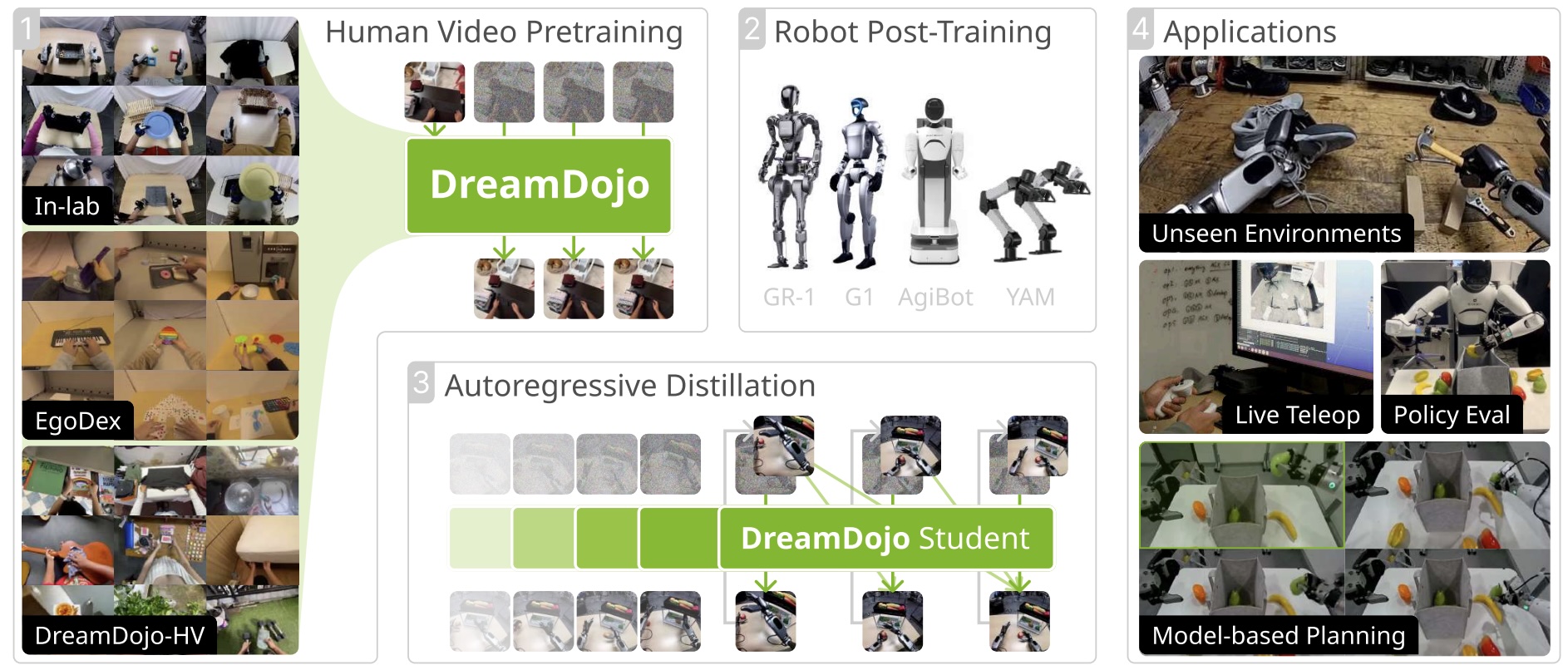
DreamDojo: A Generalist Robot World Model from Large-Scale Human Videos
International Conference on Machine Learning (ICML), July 2026
Spotlight Presentation
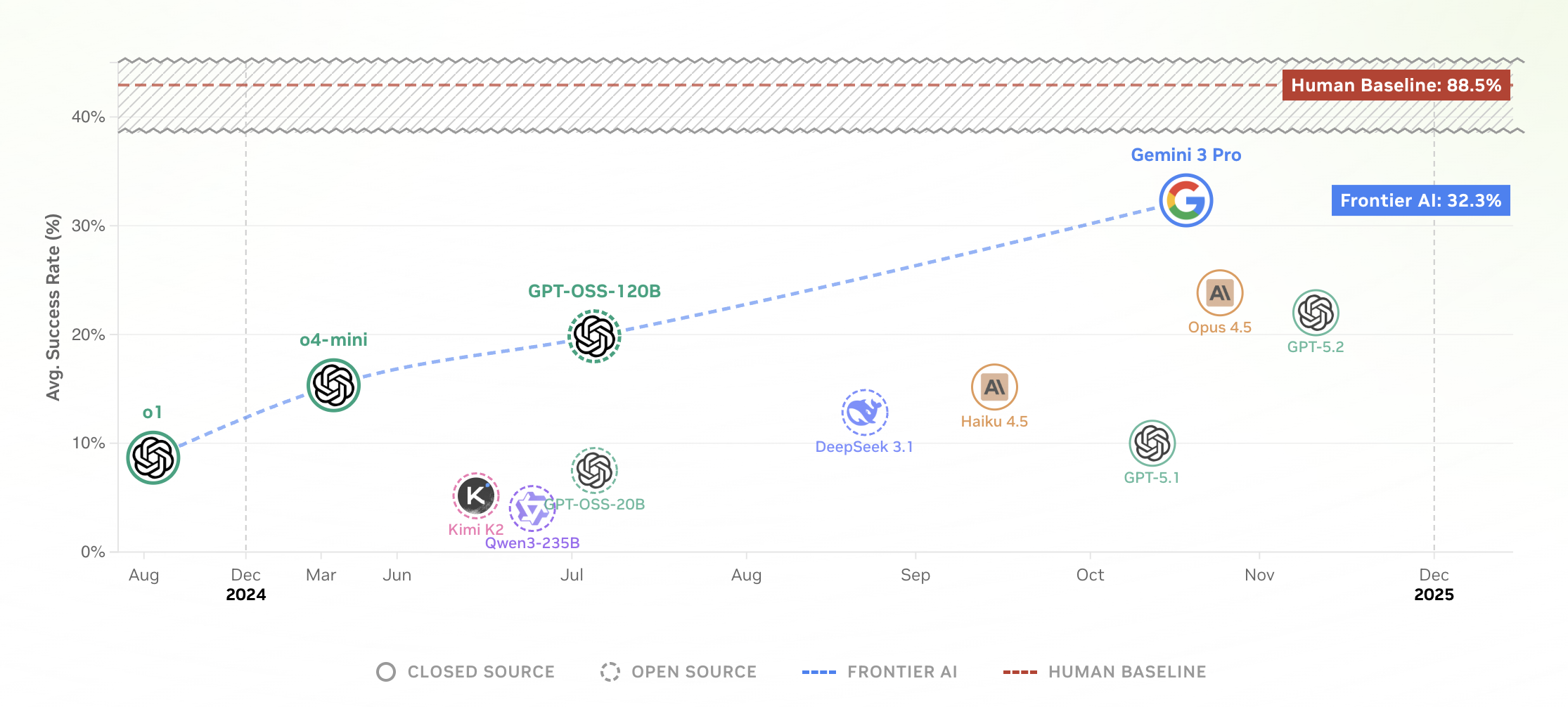
CaP-X: A Framework for Benchmarking and Improving Coding Agents for Robot Manipulation
International Conference on Machine Learning (ICML), July 2026
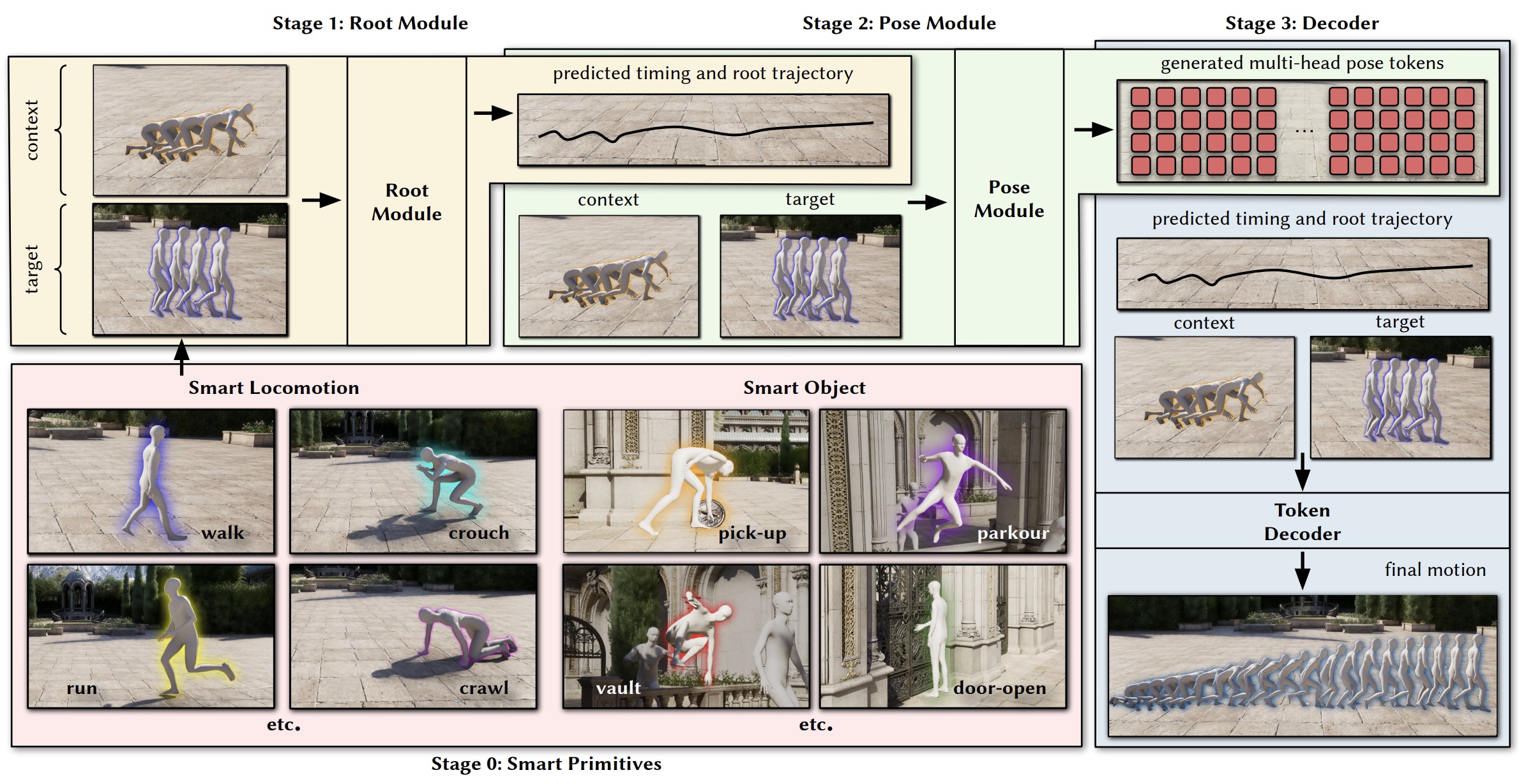
MotionBricks: Scalable Real-Time Motions with Modular Latent Generative Model and Smart Primitives
ACM SIGGRAPH Conference, July 2026
Technical Papers Trailer
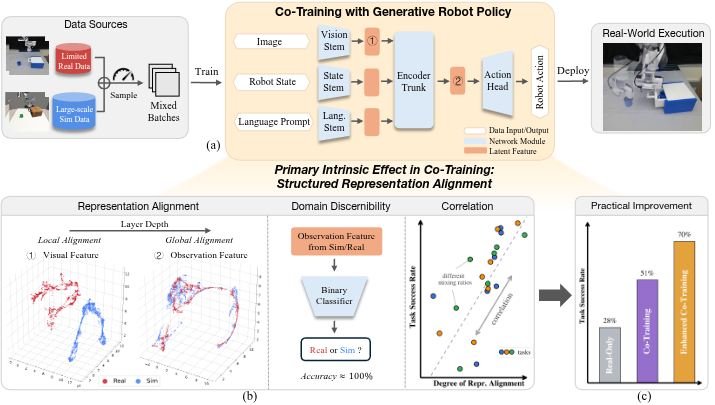
A Mechanistic Analysis of Sim-and-Real Co-Training in Generative Robot Policies
International Conference on Machine Learning (ICML), July 2026
Opening the Sim-to-Real Door for Humanoid Pixel-to-Action Policy Transfer
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2026
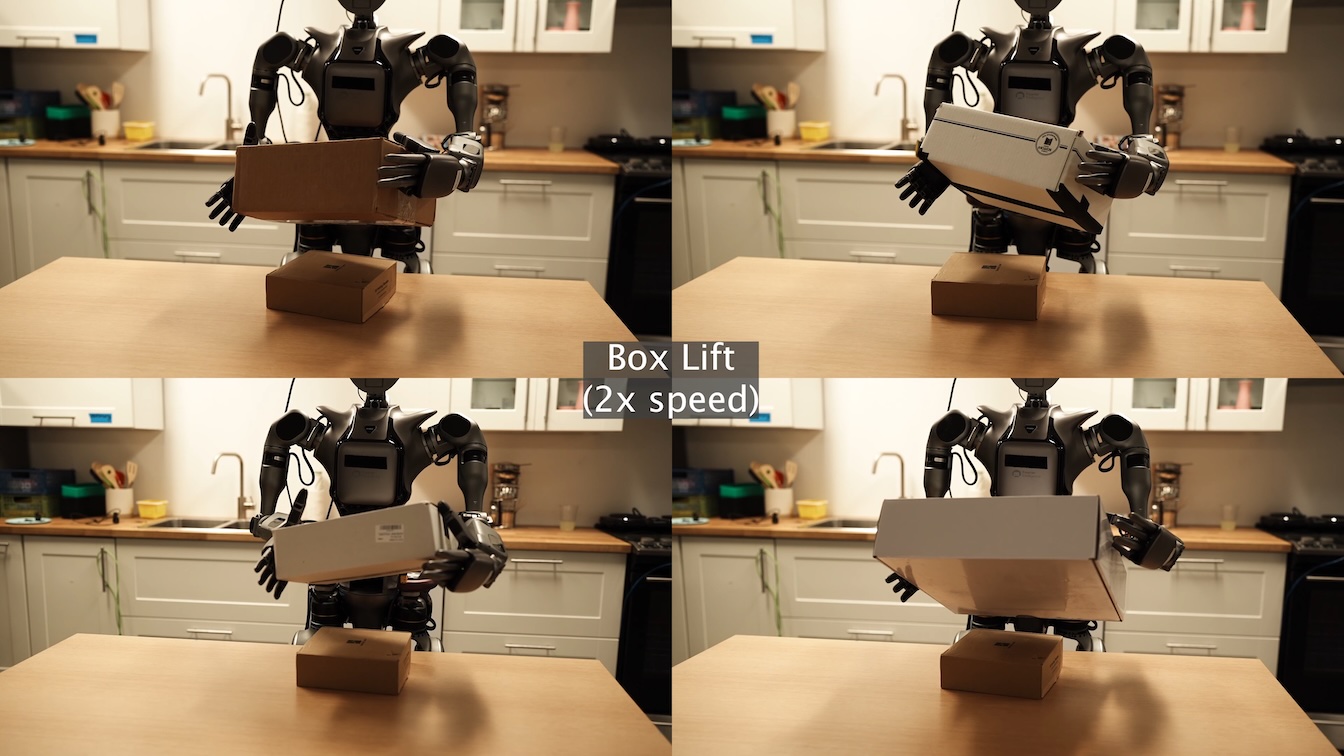
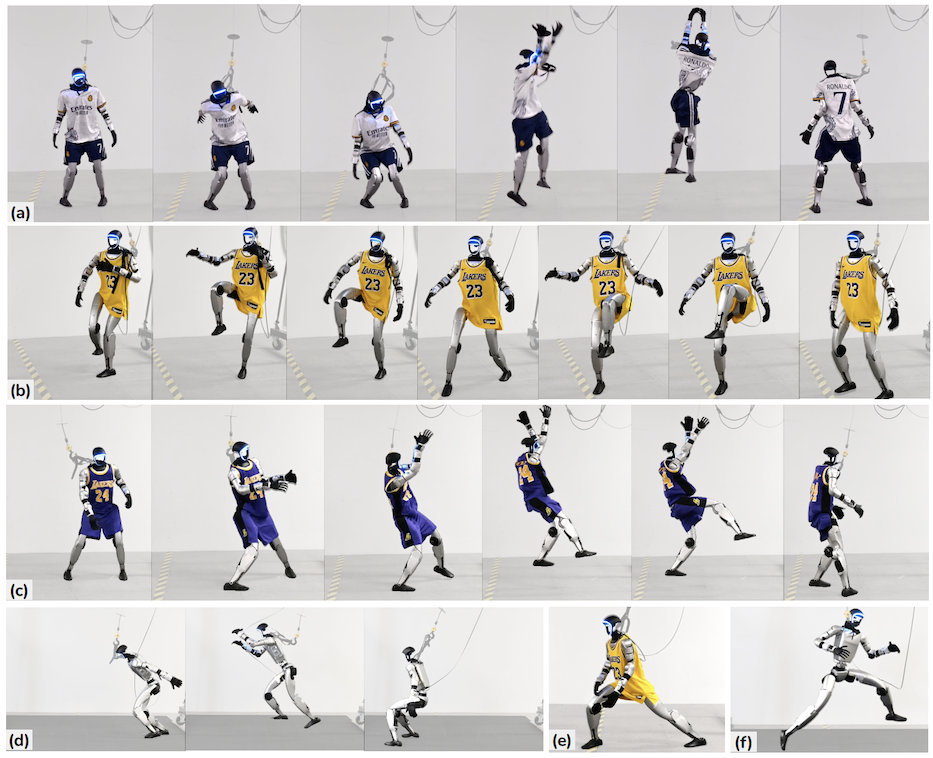
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2026
NitroGen: An Open Foundation Model for Generalist Gaming Agents
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2026
Best Paper Honorable Mention
SCIZOR: Self-Supervised Data Curation for Imitation Learning
IEEE International Conference on Robotics and Automation (ICRA), June 2026
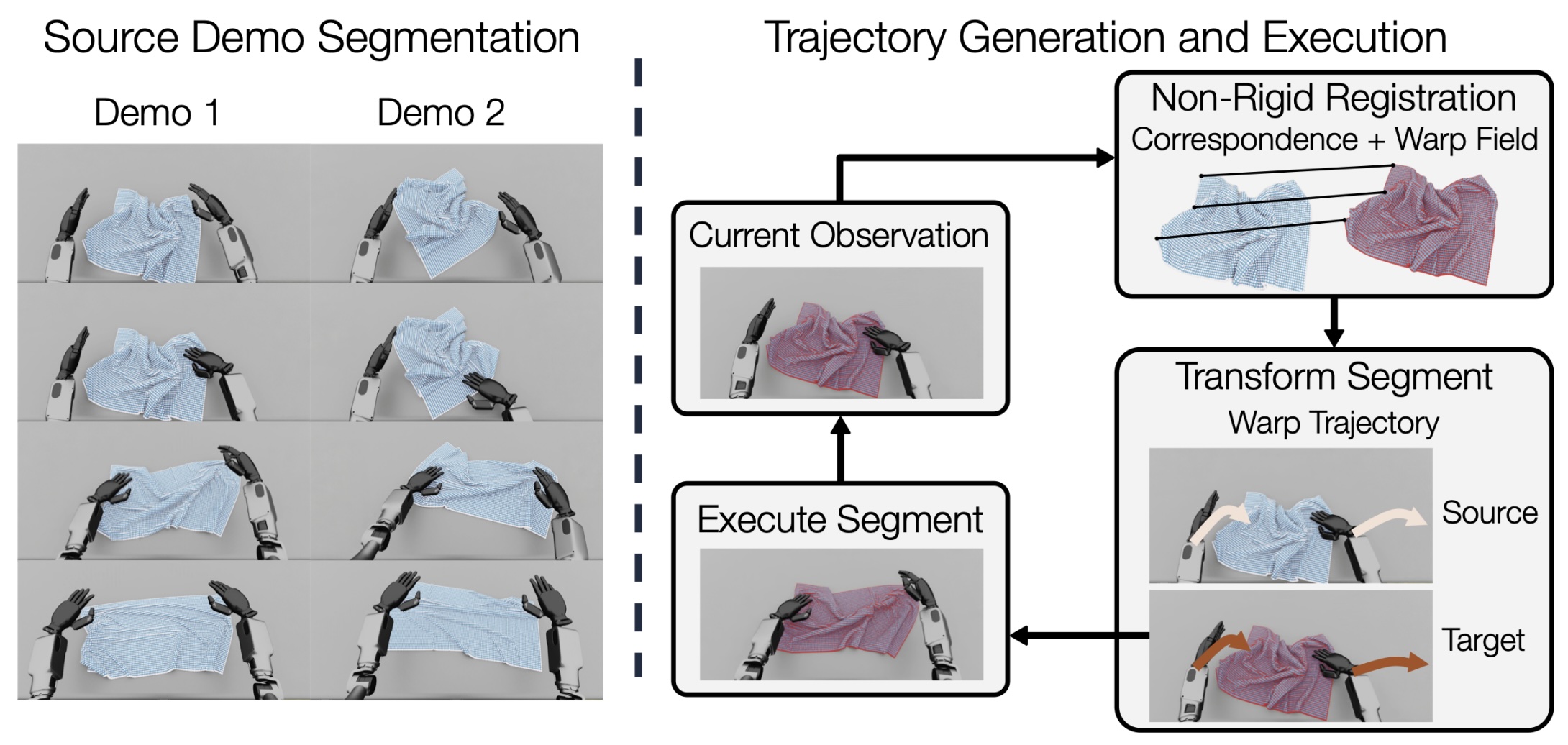
SoftMimicGen: A Data Generation System for Scalable Robot Learning in Deformable Object Manipulation
IEEE International Conference on Robotics and Automation (ICRA), June 2026

MimicDroid: In-Context Learning for Humanoid Robot Manipulation from Human Play Videos
IEEE International Conference on Robotics and Automation (ICRA), June 2026

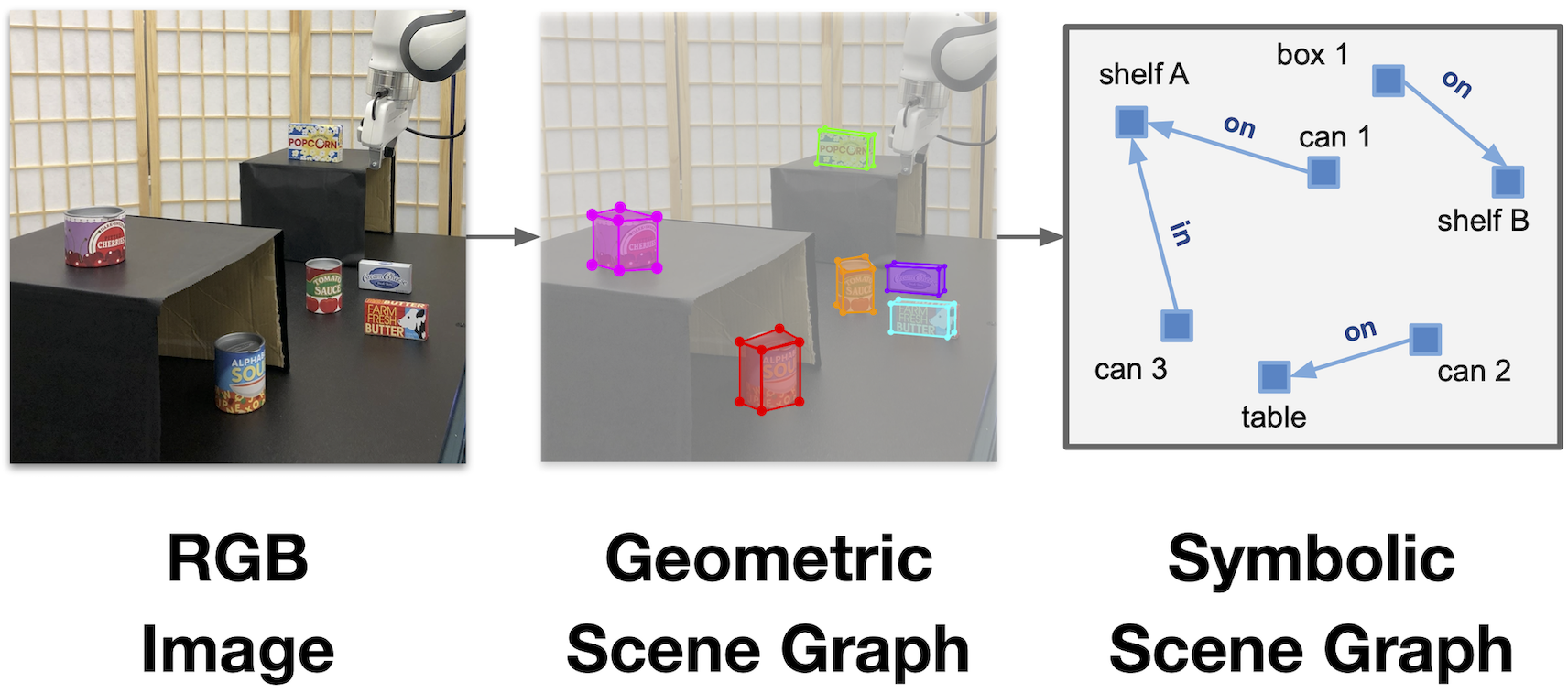
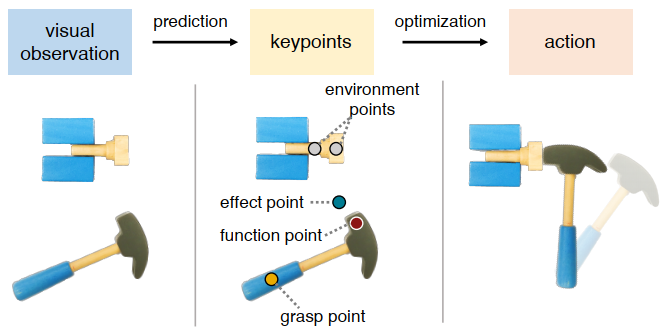
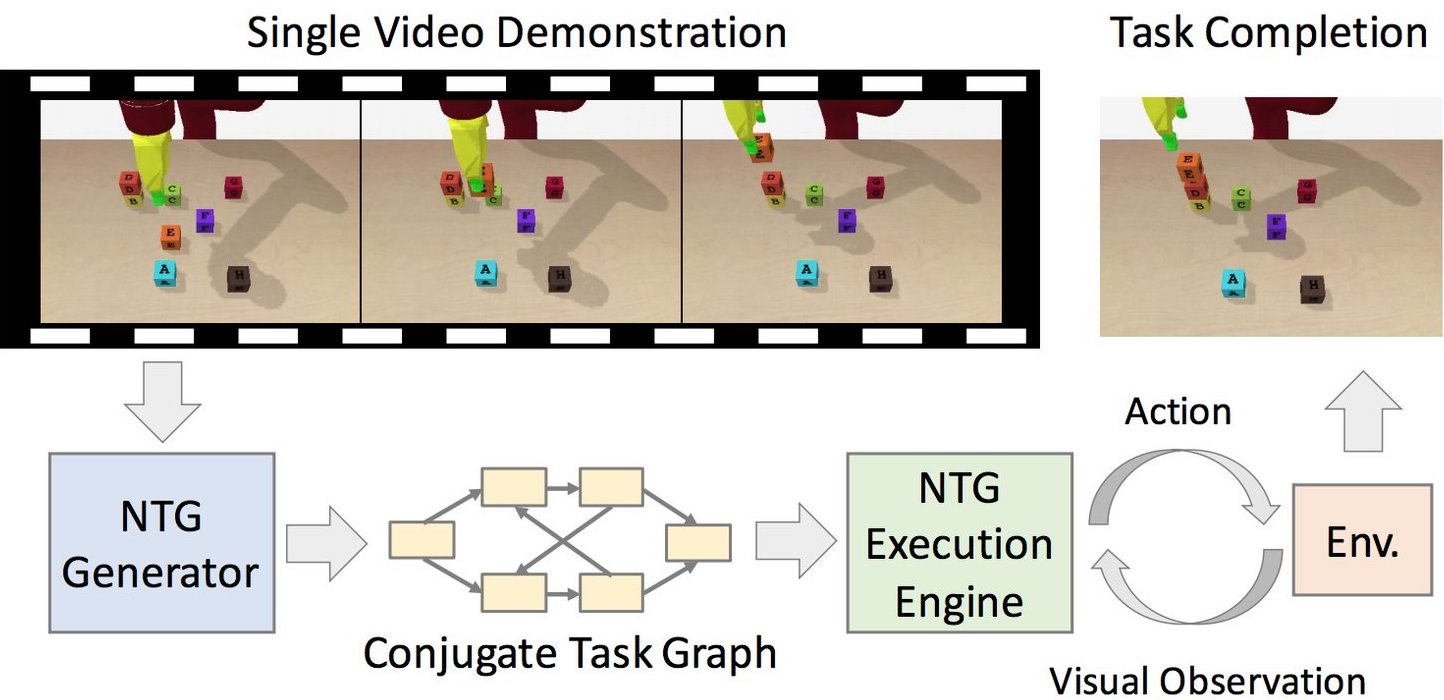
Vision-based Manipulation from Single Human Video with Open-World Object Graphs
Autonomous Robots, May 2026
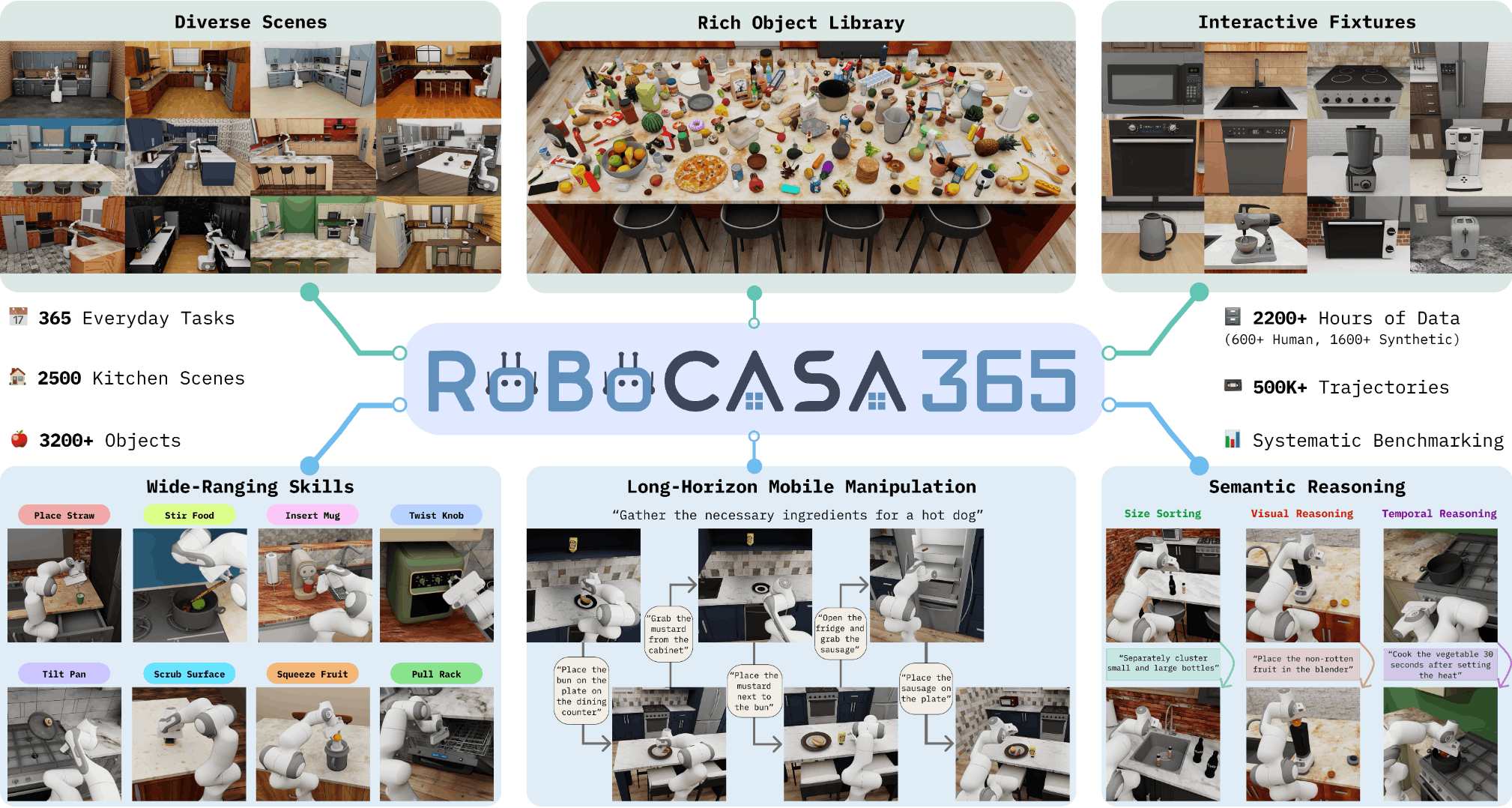
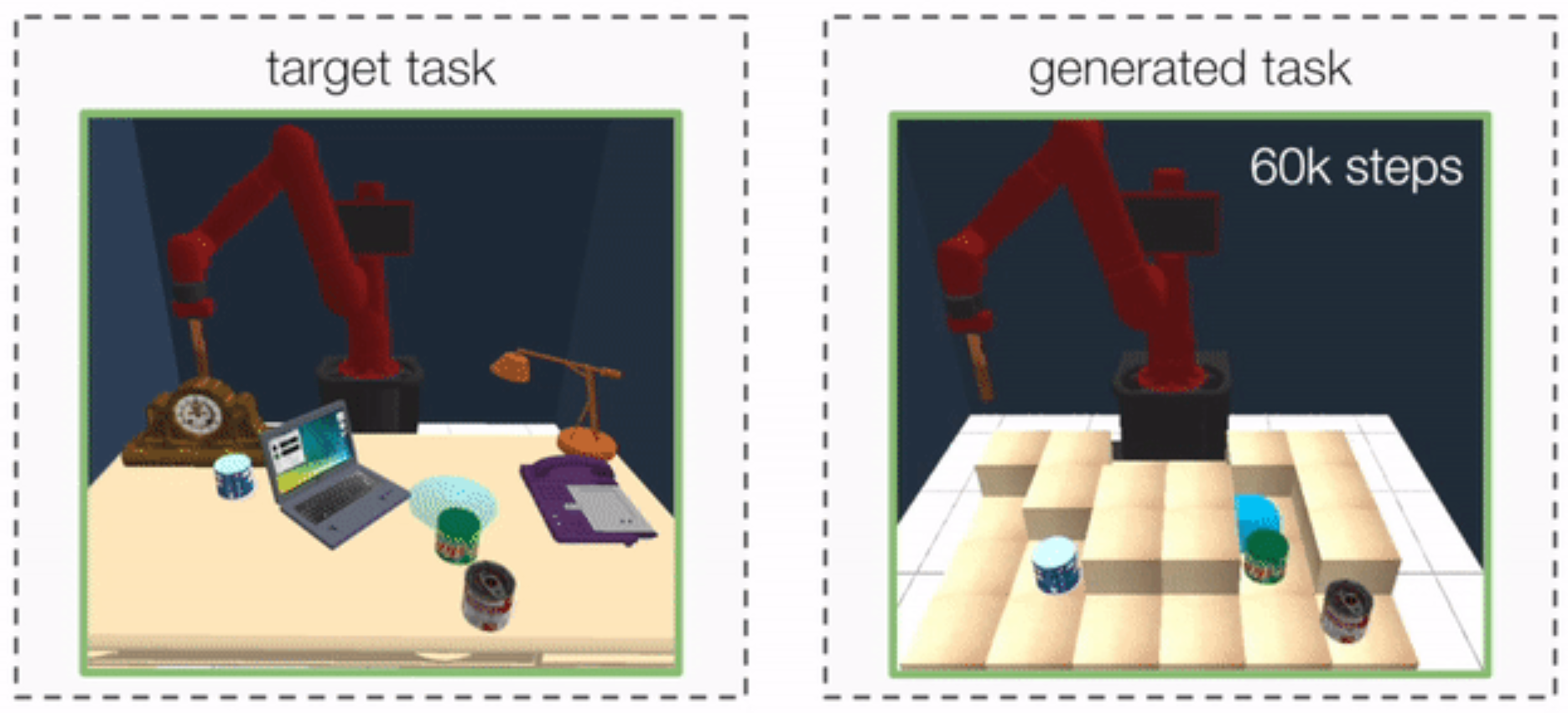
RoboCasa365: A Large-Scale Simulation Framework for Training and Benchmarking Generalist Robots
International Conference on Learning Representations (ICLR), April 2026
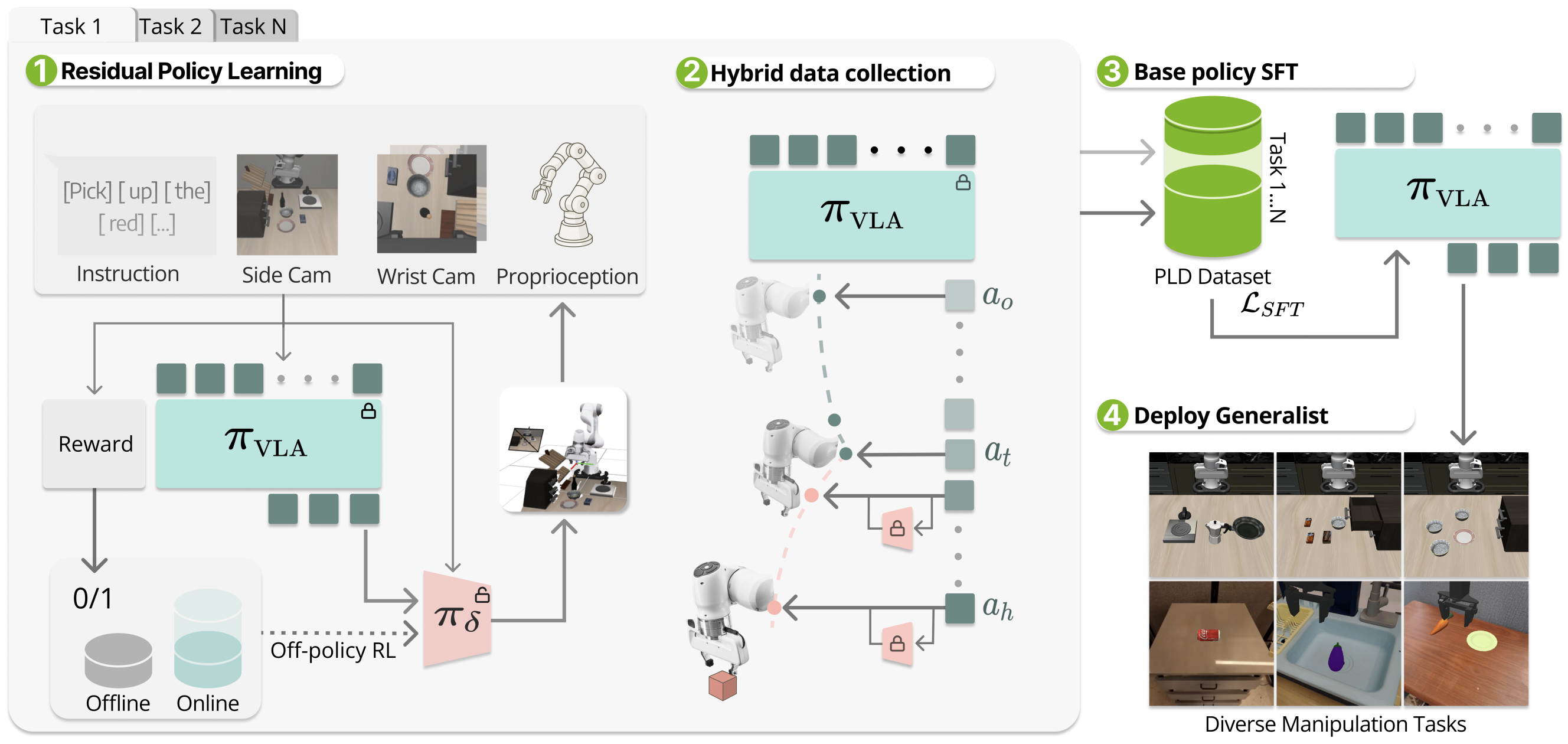
Self-Improving Vision-Language-Action Models with Data Generation via Residual RL
International Conference on Learning Representations (ICLR), April 2026
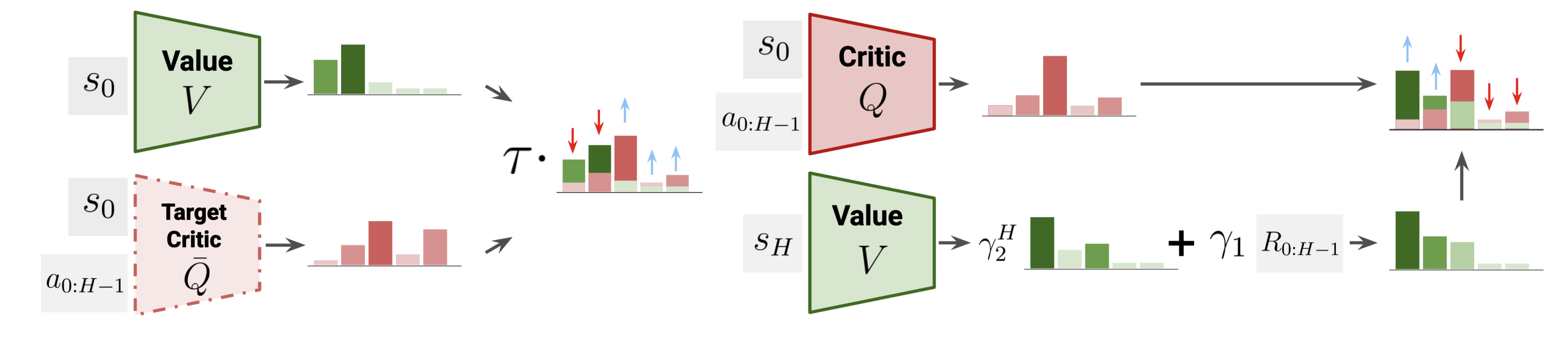
DEAS: DEtached value learning with Action Sequence for Scalable Offline RL
International Conference on Learning Representations (ICLR), April 2026

Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
IEEE/ASME Transactions on Mechatronics (TMECH), March 2026
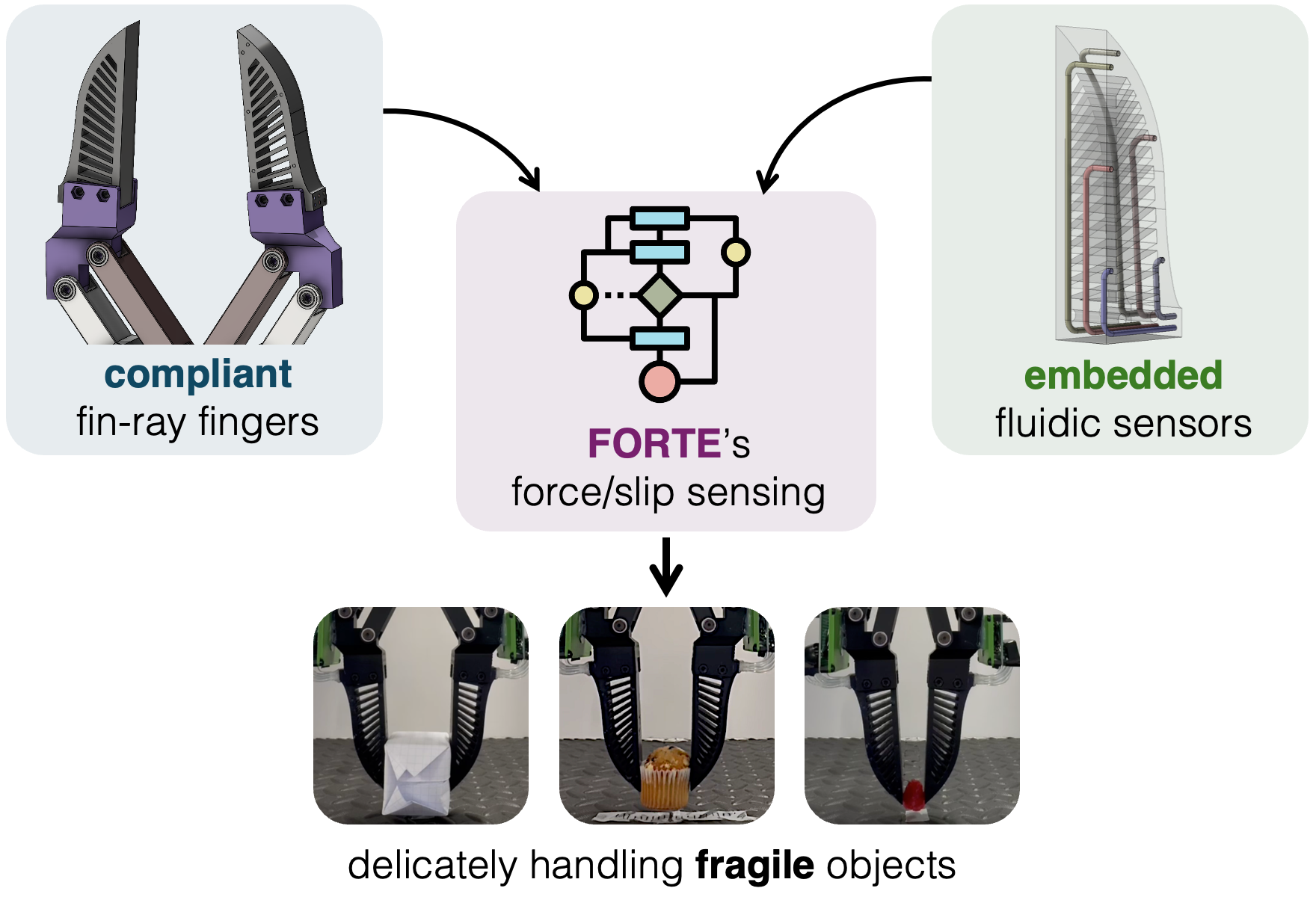
FORTE: Tactile Force and Slip Sensing on Compliant Fingers for Delicate Manipulation
IEEE Robotics and Automation Letters (RA-L), March 2026
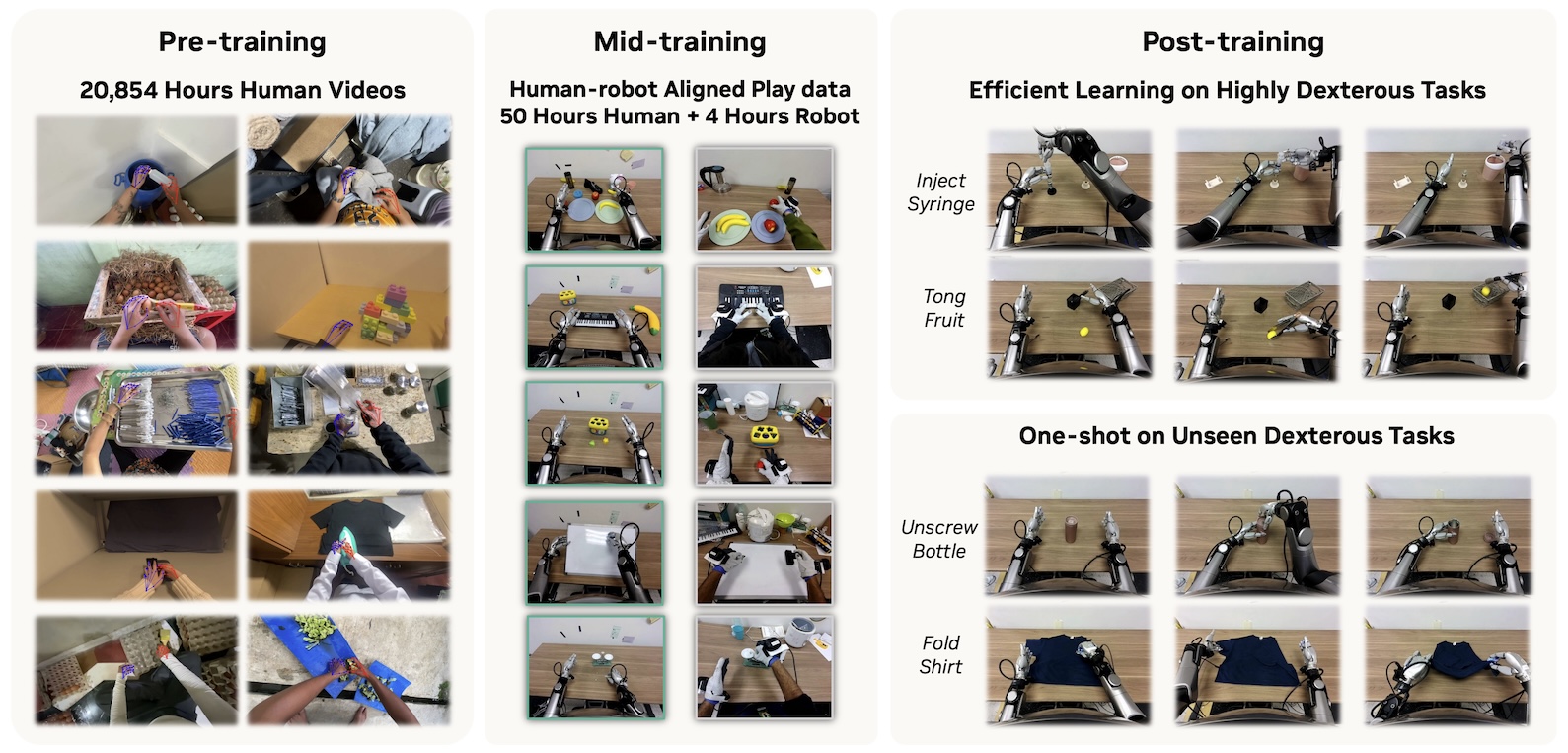
EgoScale: Scaling Dexterous Manipulation with Diverse Egocentric Human Data
Technical report arXiv:2602.16710, February 2026
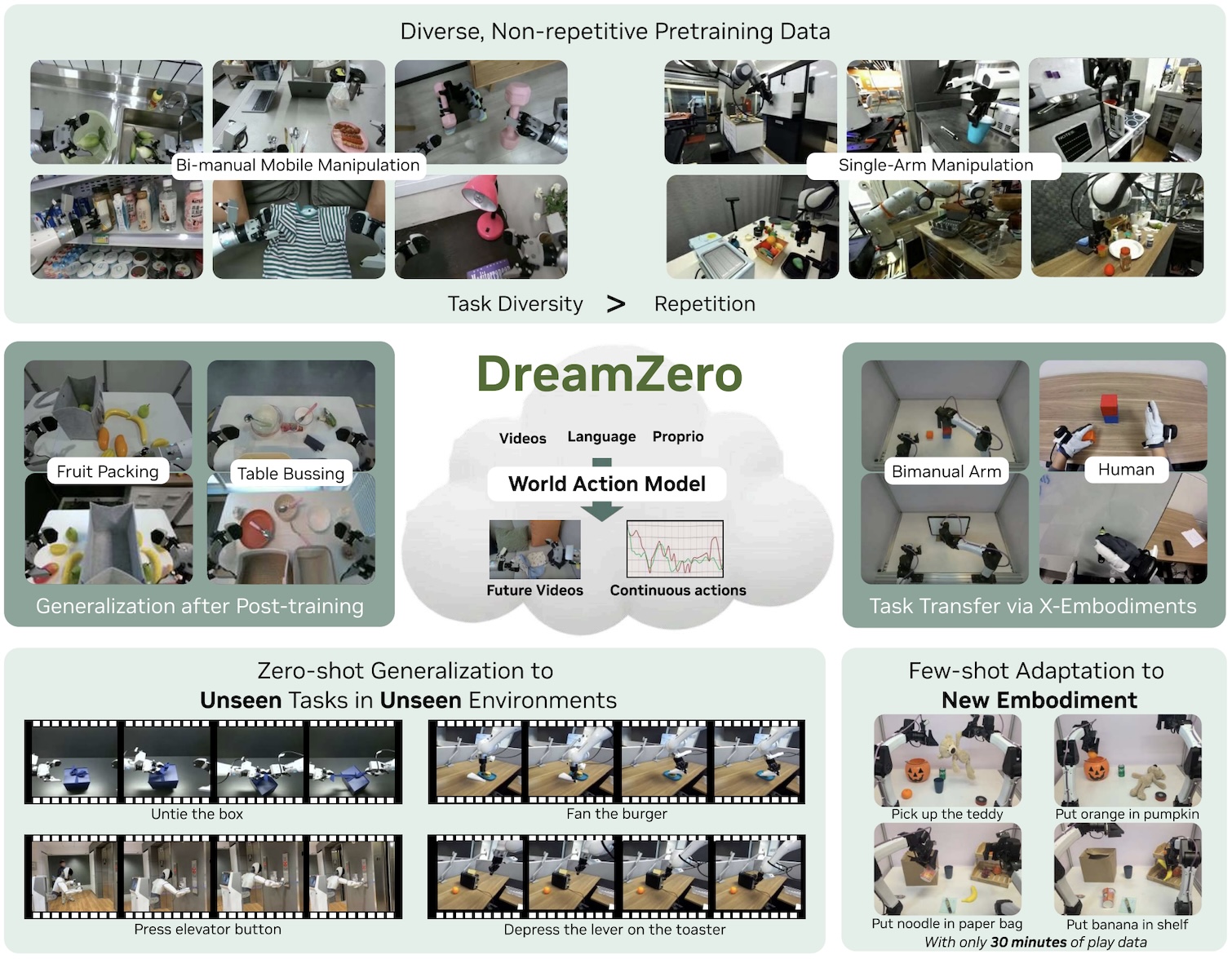
World Action Models are Zero-shot Policies
Technical report arXiv:2602.15922, February 2026
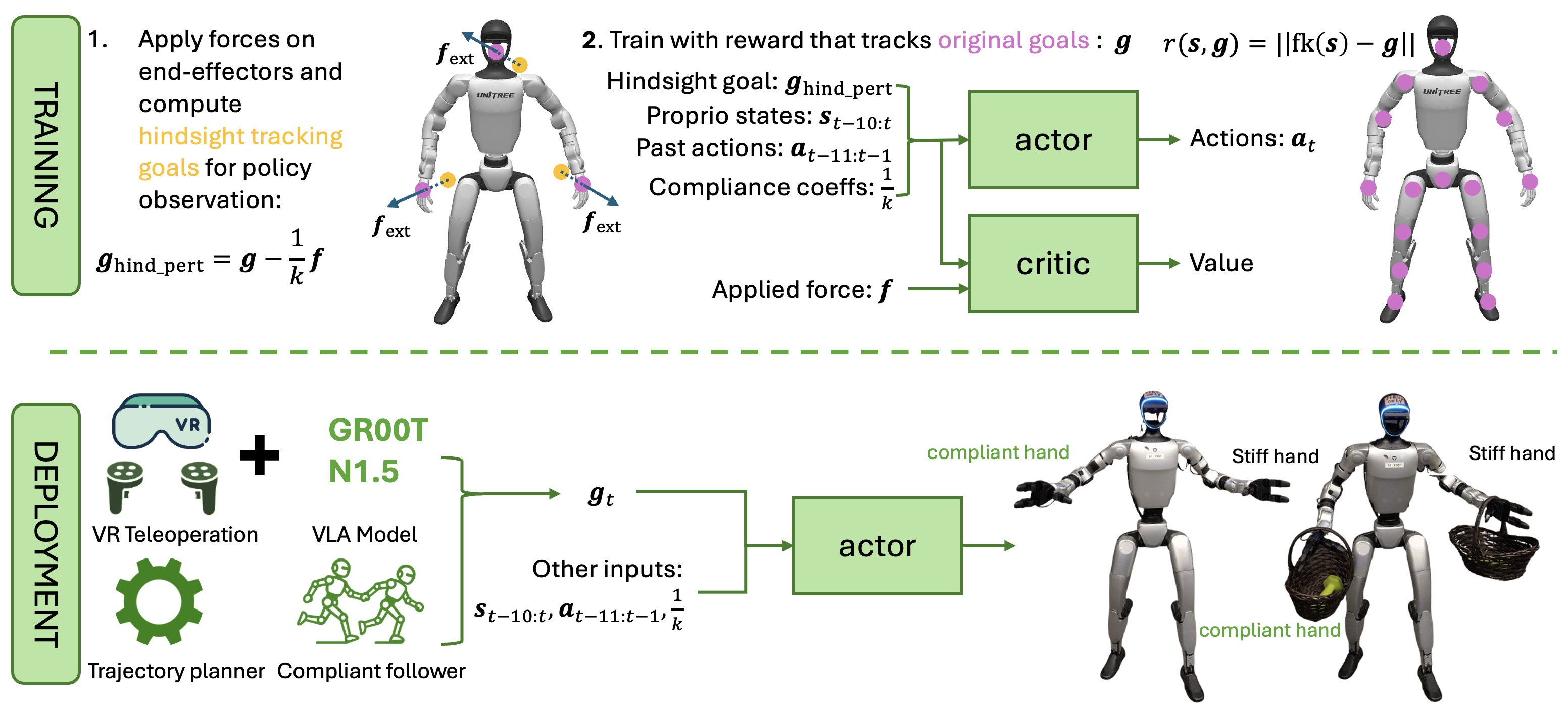
CHIP: Adaptive Compliance for Humanoid Control through Hindsight Perturbation
Technical report arXiv:2512.14689, February 2026
2025
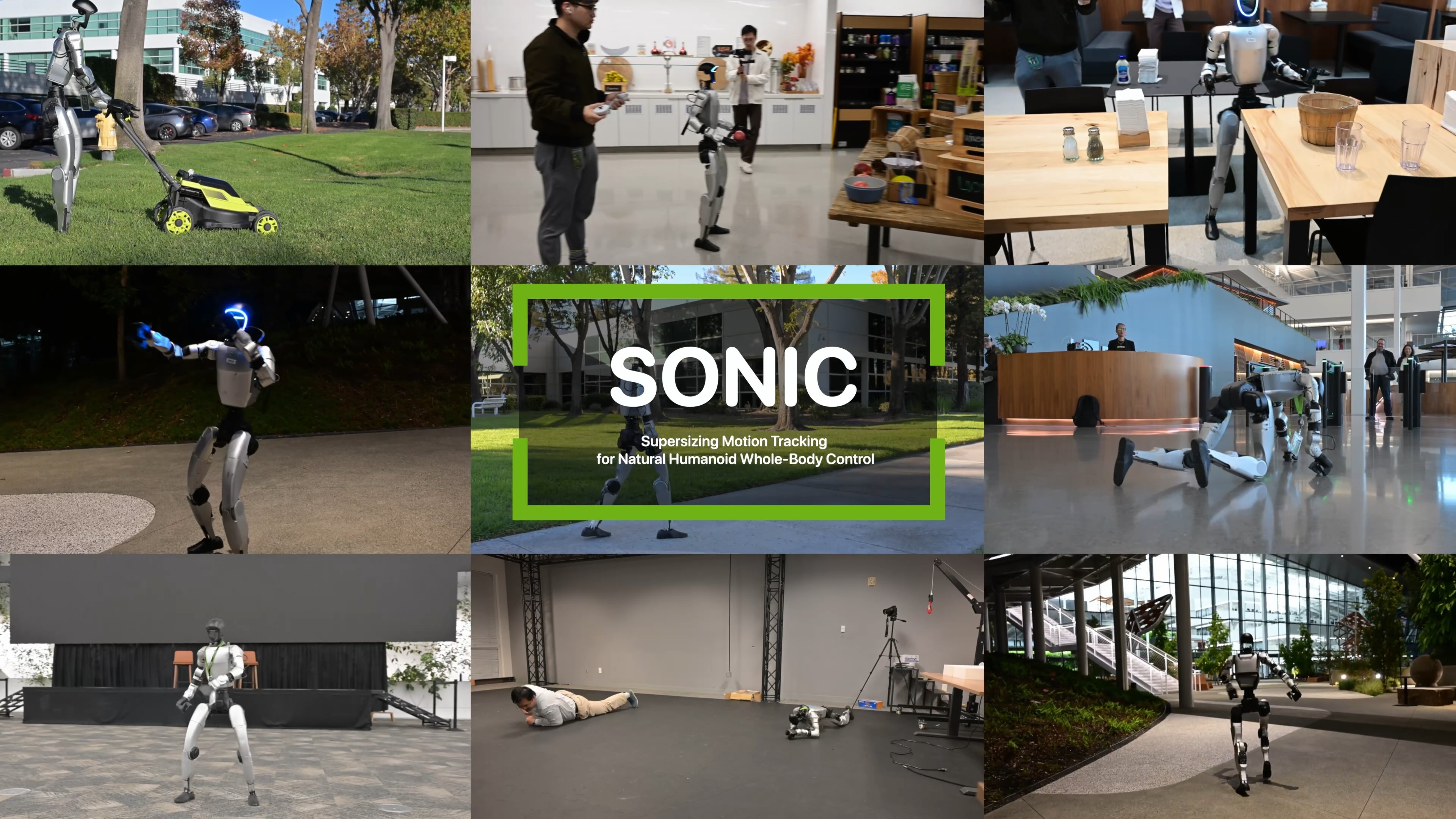
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Technical report arXiv:2511.07820, November 2025
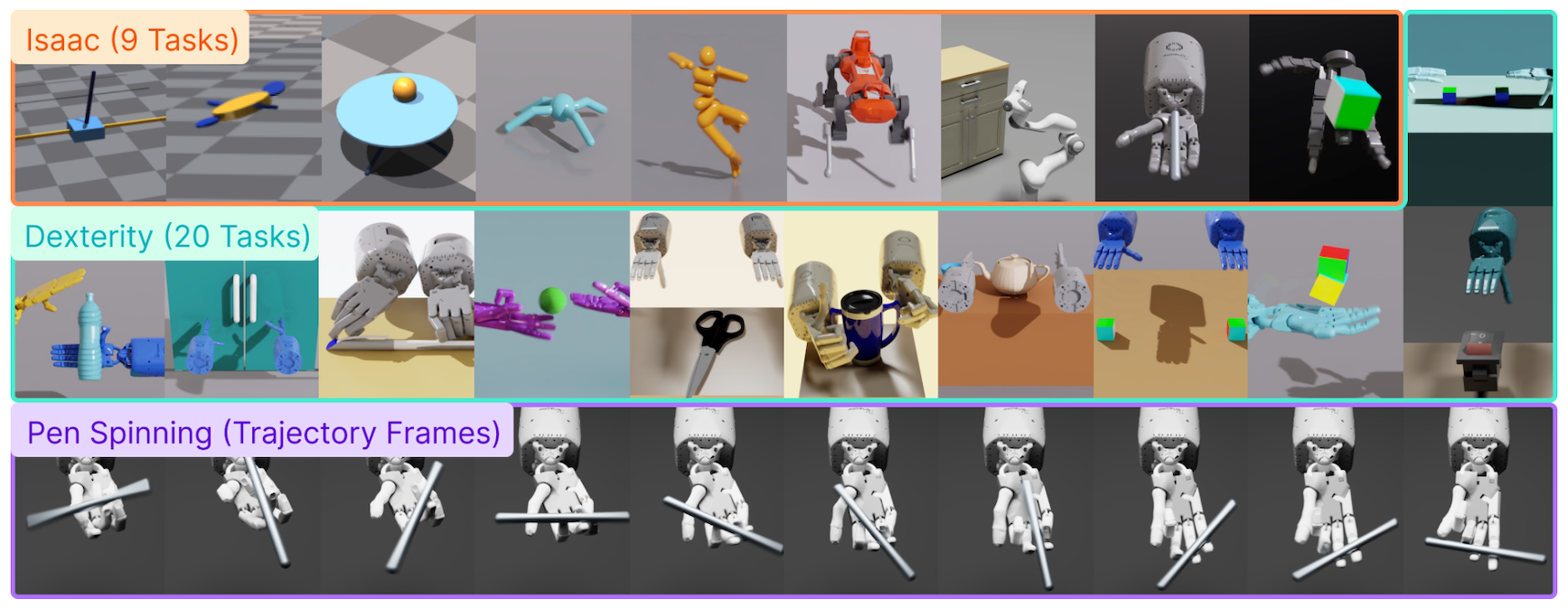
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Technical report arXiv:2511.04831, November 2025
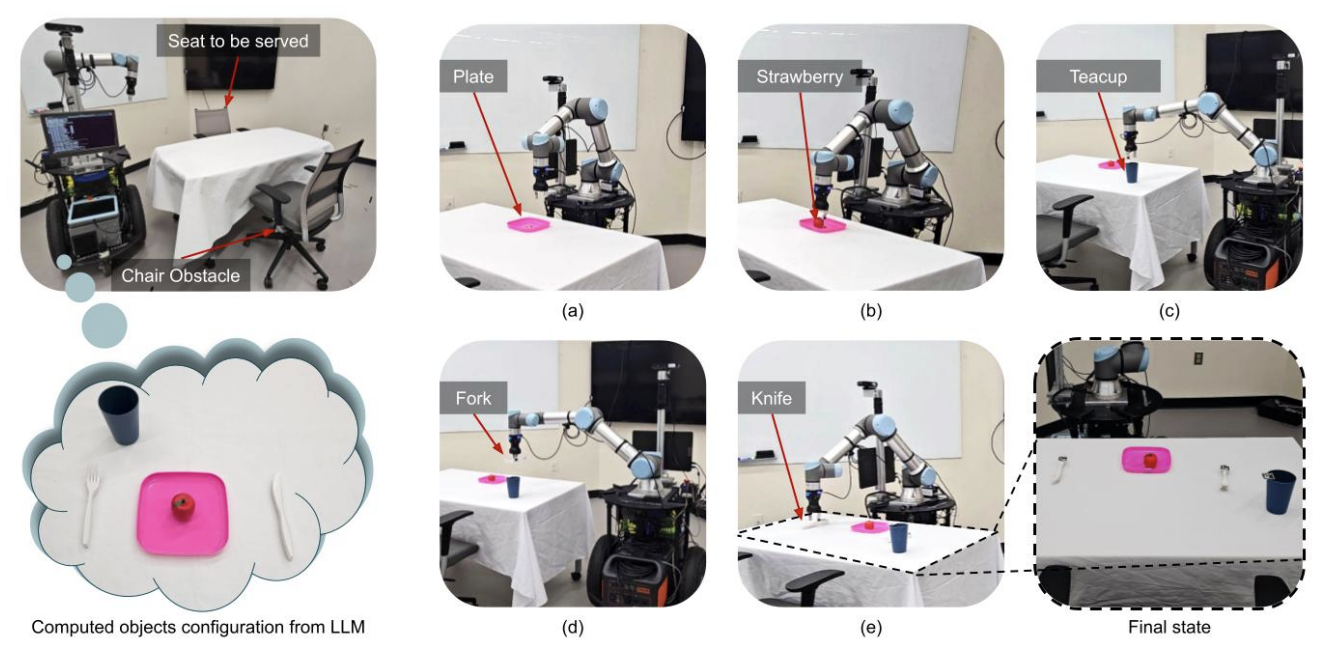
LLM-GROP: Visually Grounded Robot Task and Motion Planning with Large Language Models
International Journal of Robotics Research (IJRR), October 2025
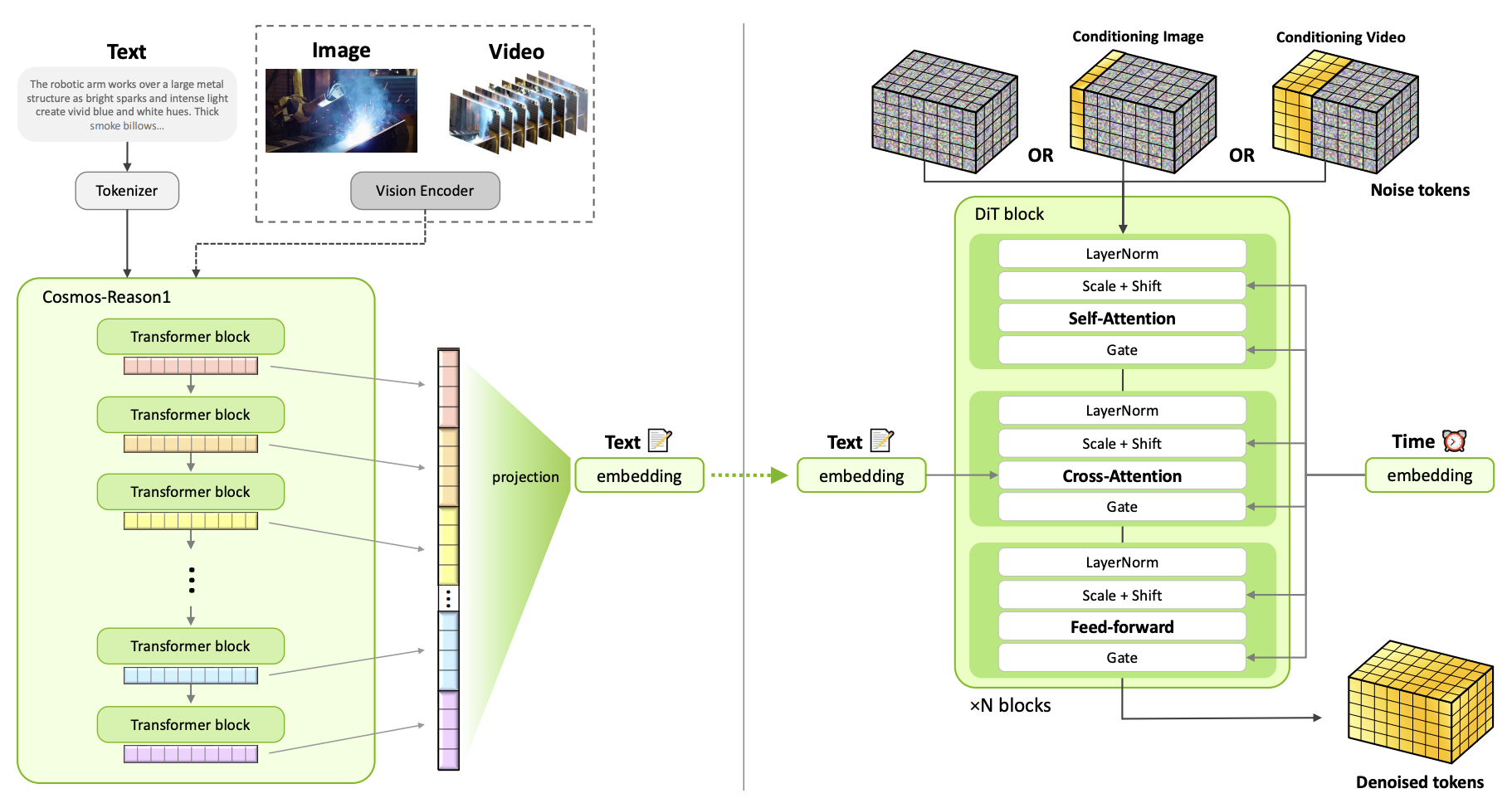
World Simulation with Video Foundation Models for Physical AI
Technical report arXiv:2511.00062, October 2025
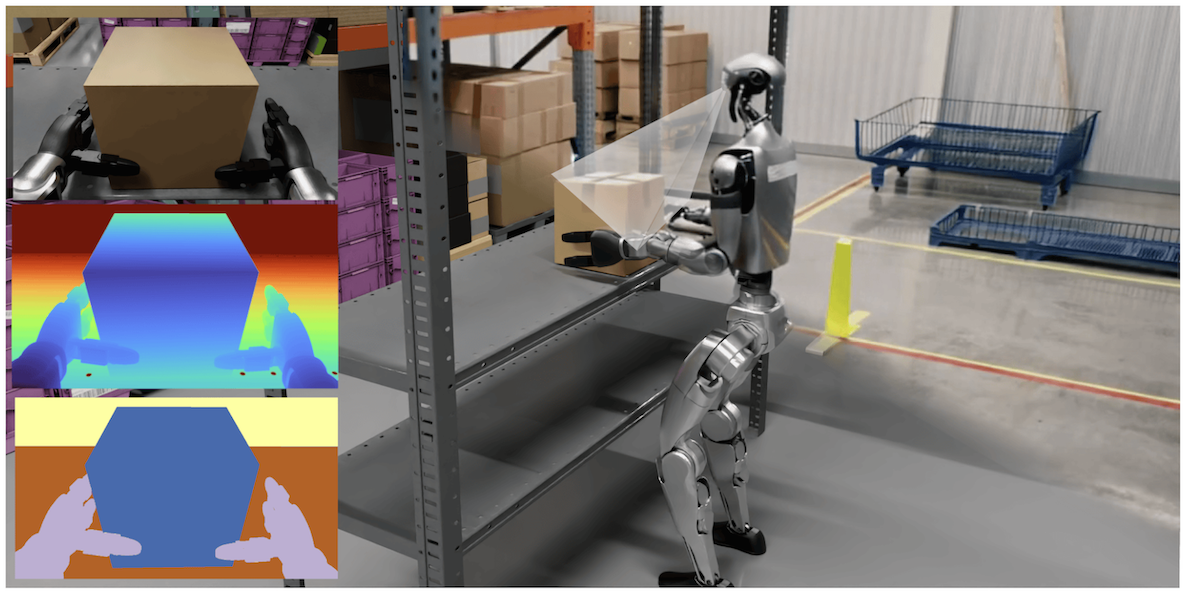
Sim-to-Real Reinforcement Learning for Vision-Based Dexterous Manipulation on Humanoids
Conference on Robot Learning (CoRL), September 2025
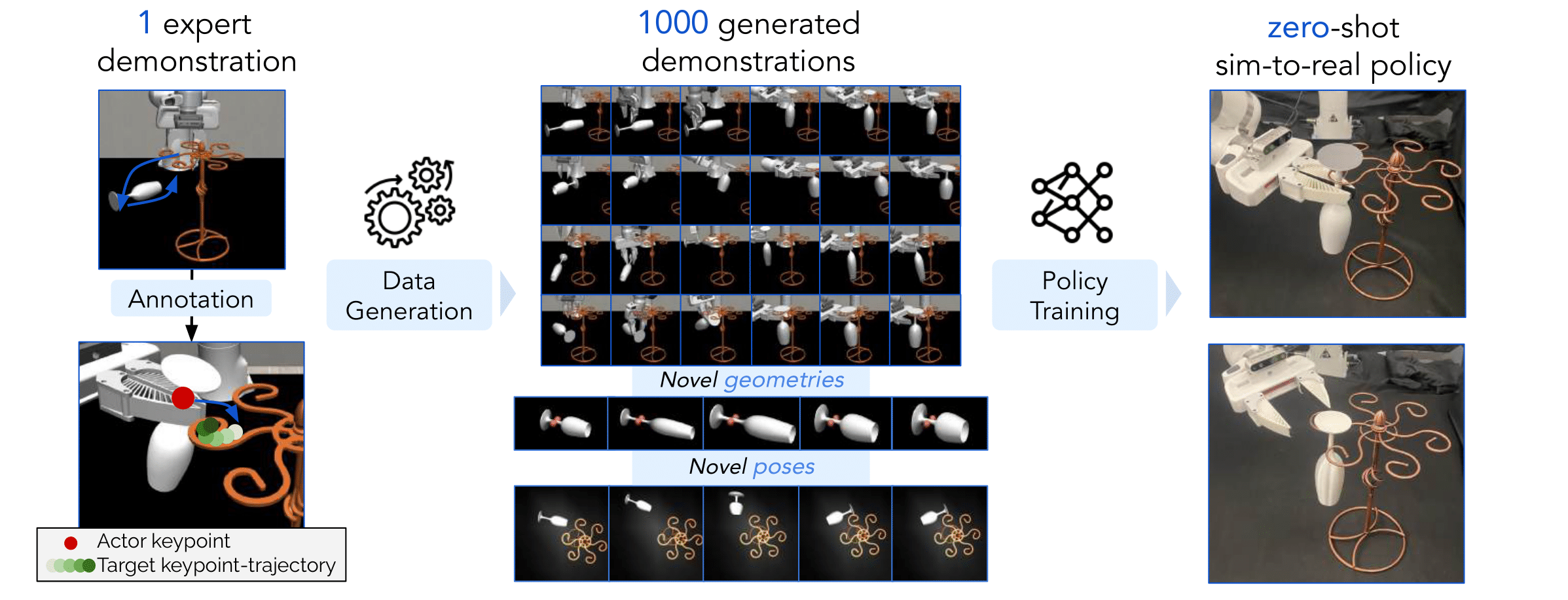
Constraint-Preserving Data Generation for Visuomotor Policy Learning
Conference on Robot Learning (CoRL), September 2025
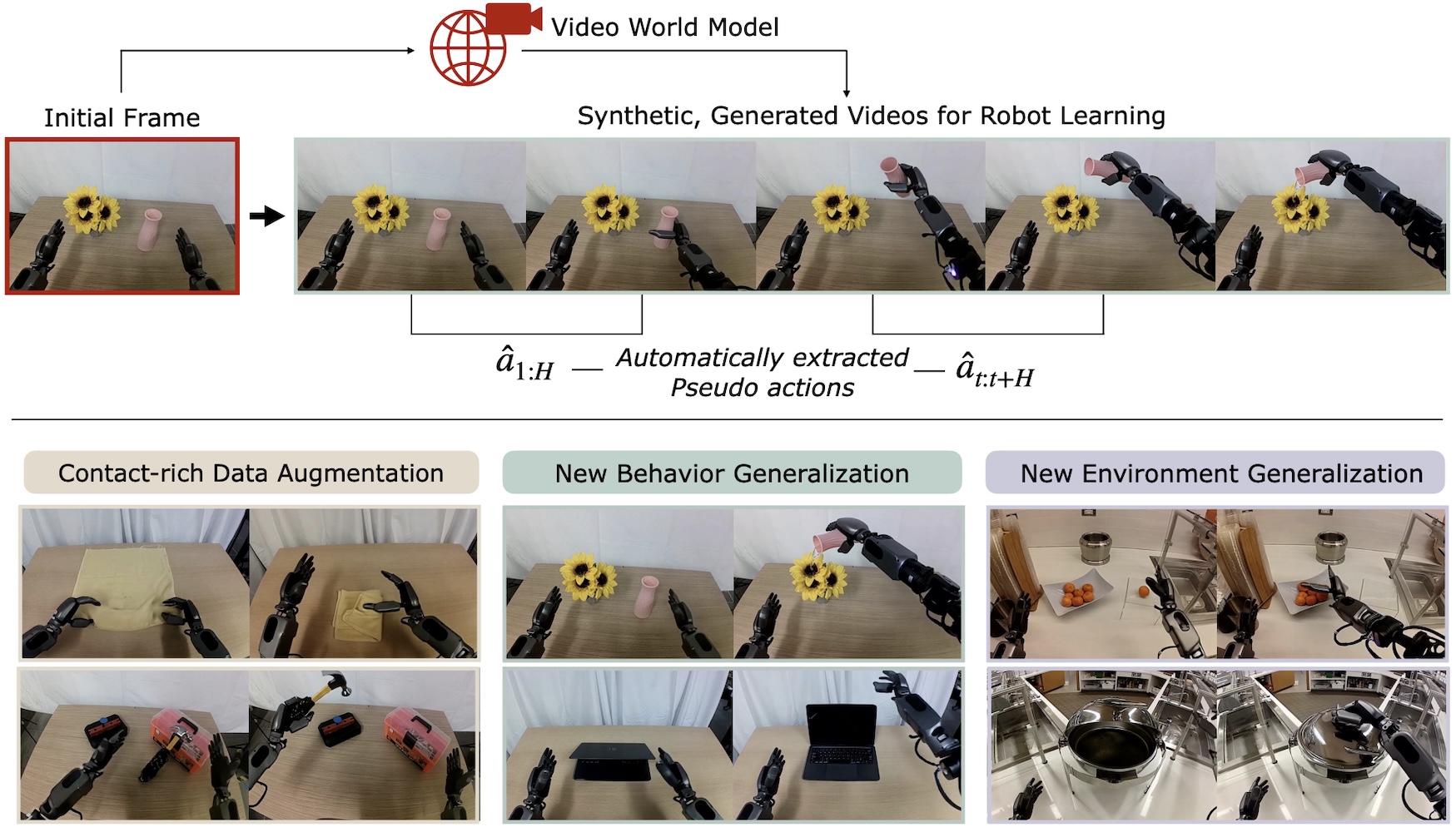
DreamGen: Unlocking Generalization in Robot Learning through Video World Models
Conference on Robot Learning (CoRL), September 2025
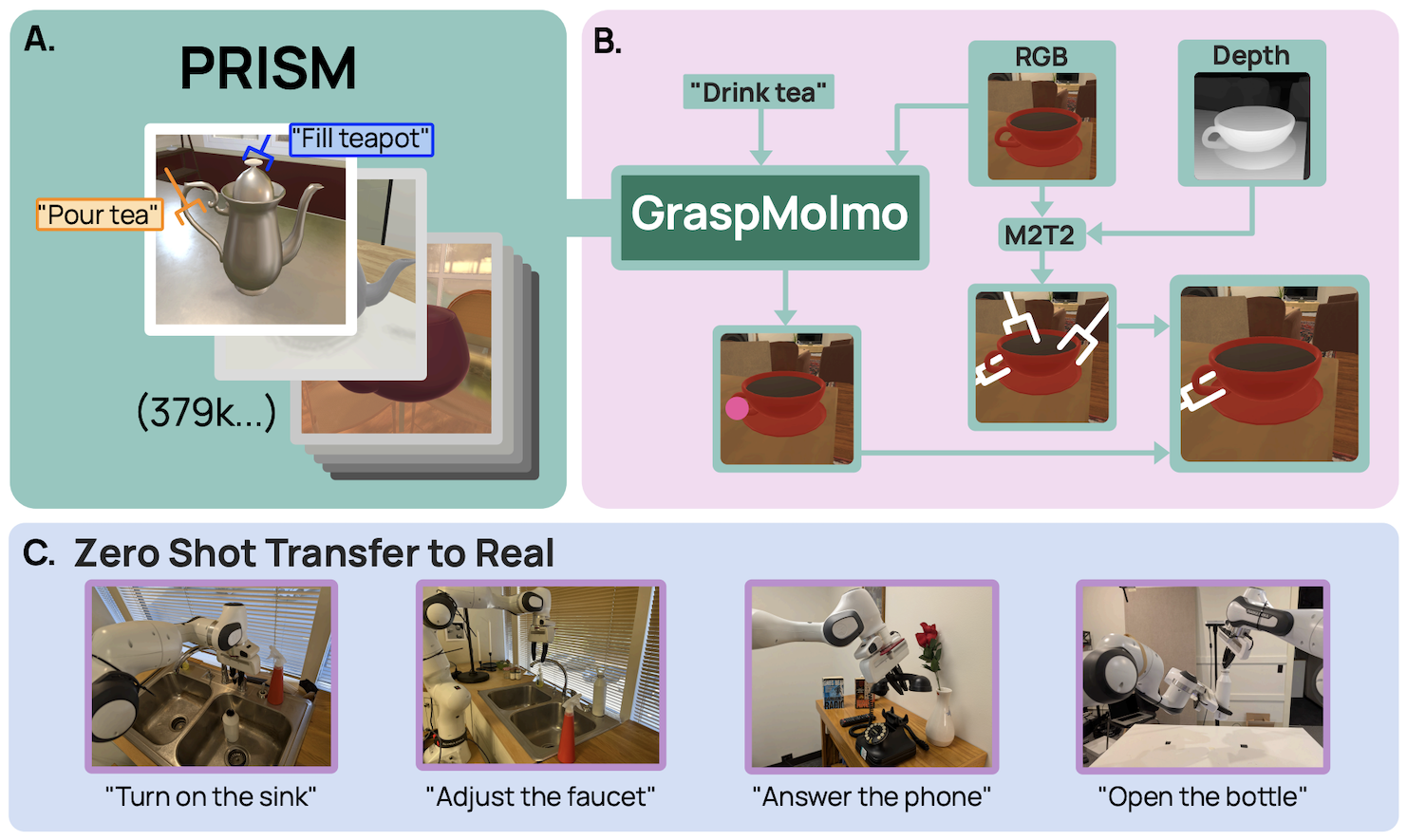
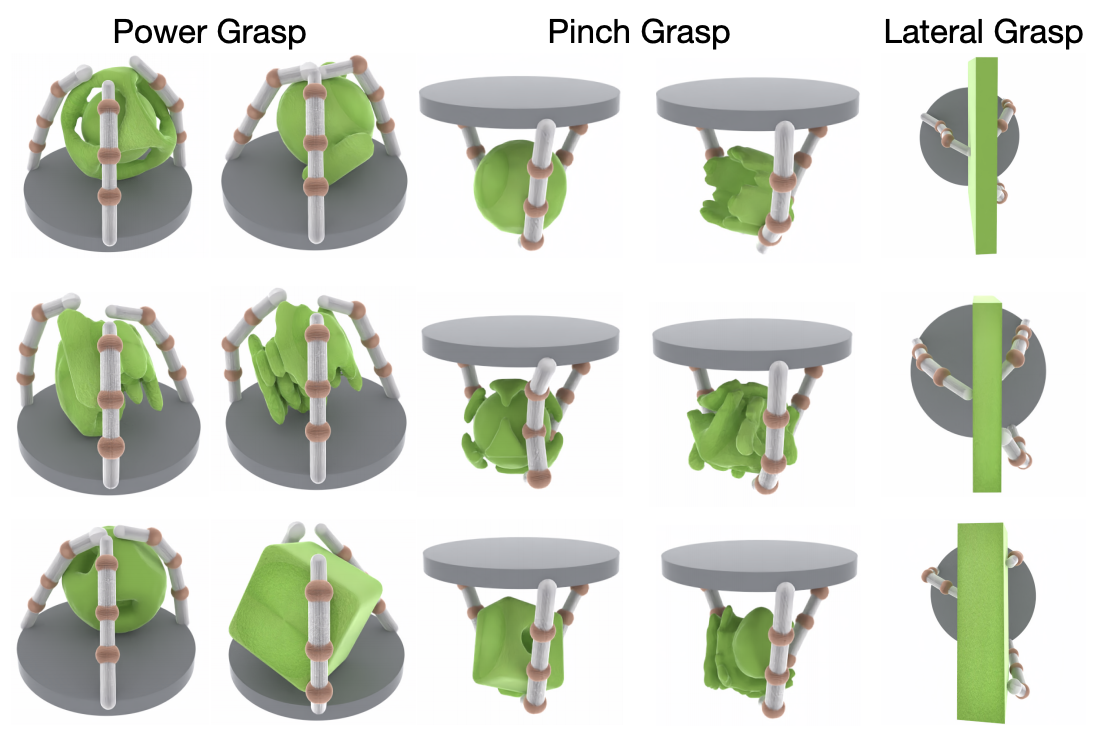
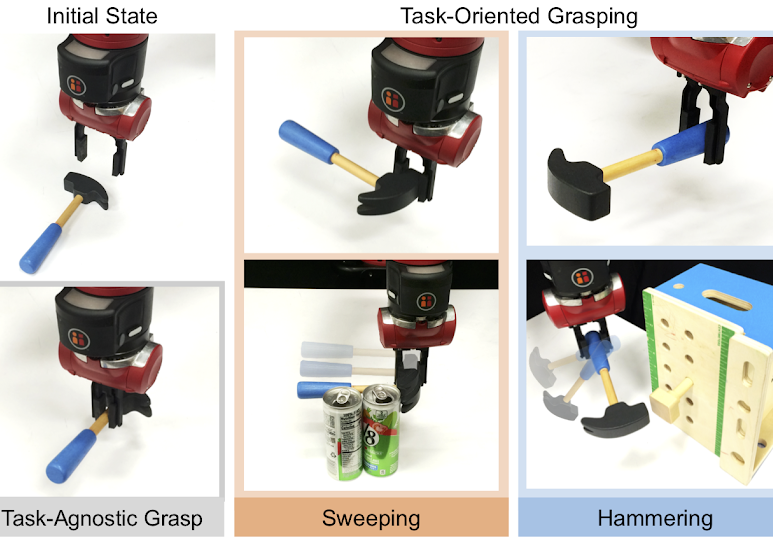
GraspMolmo: Generalizable Task-Oriented Grasping via Large-Scale Synthetic Data Generation
Conference on Robot Learning (CoRL), September 2025
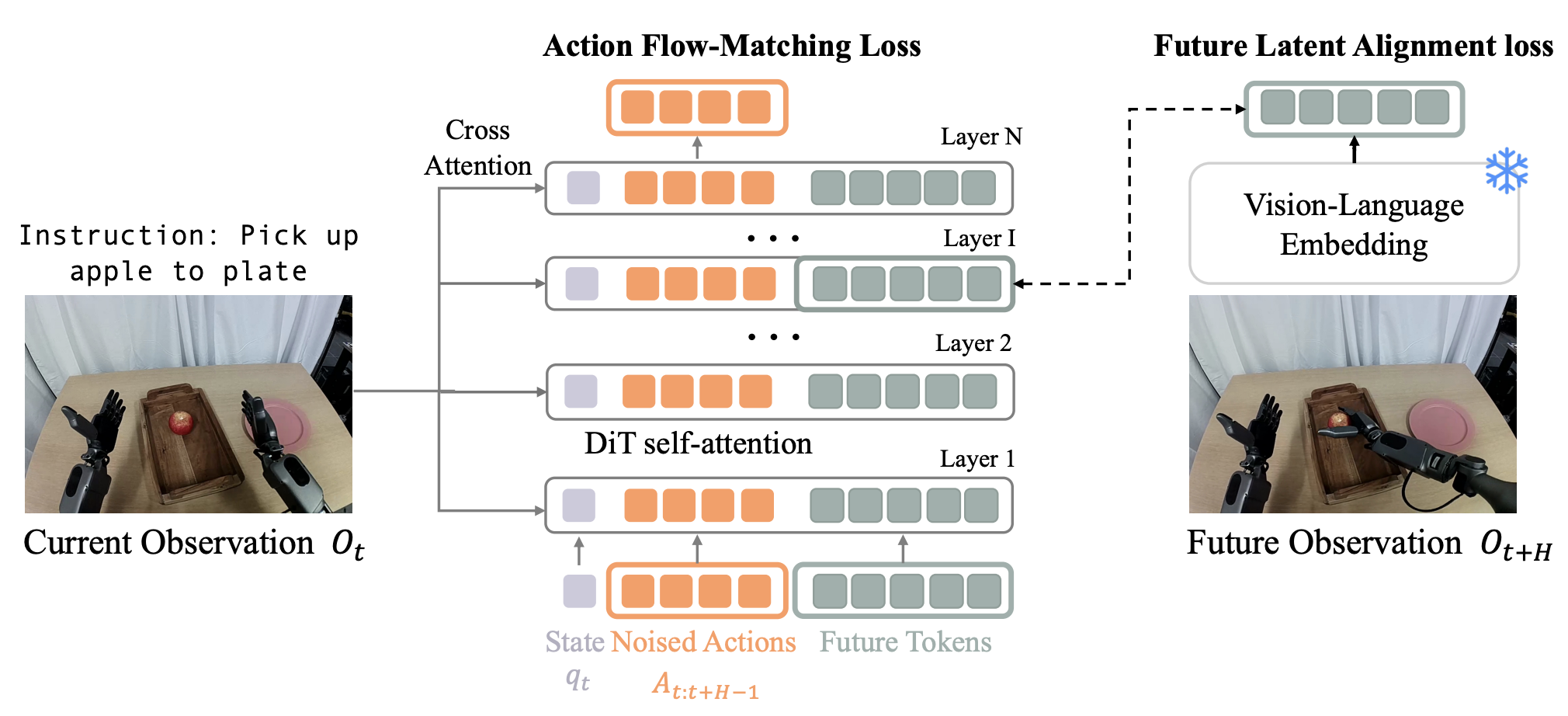
FLARE: Robot Learning with Implicit World Modeling
Conference on Robot Learning (CoRL), September 2025

Casper: Inferring Diverse Intents for Assistive Teleoperation with Vision Language Models
Conference on Robot Learning (CoRL), September 2025
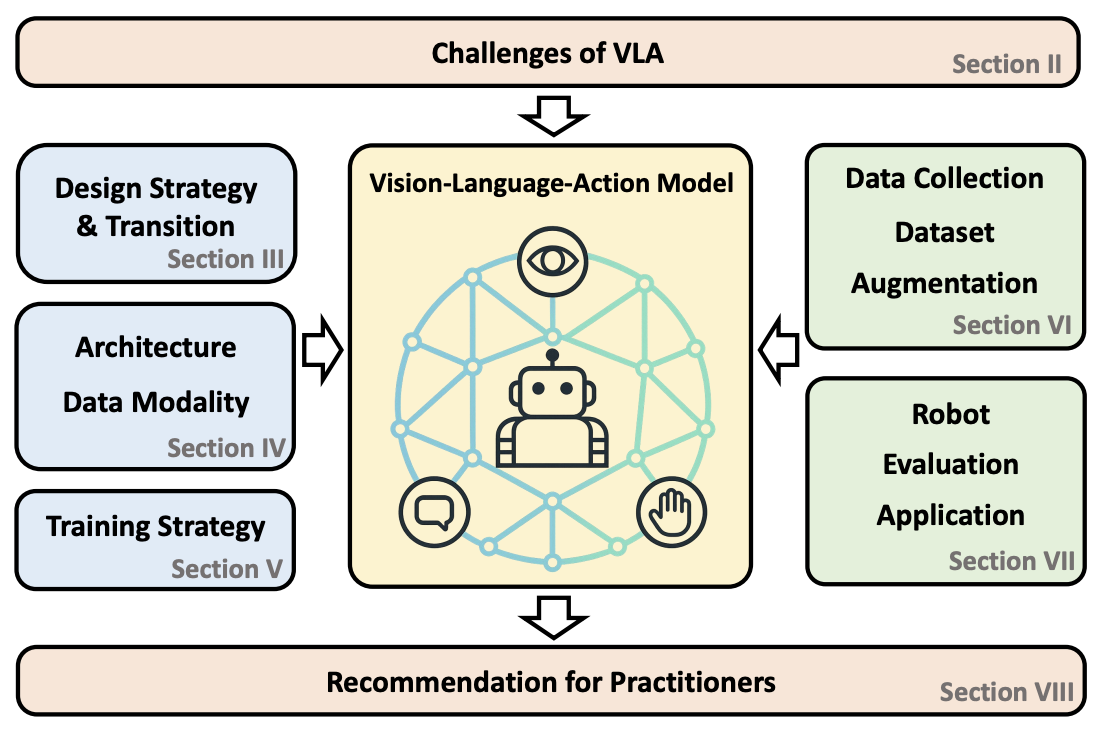
Vision-Language-Action Models for Robotics: A Review Towards Real-World Applications
IEEE Access, September 2025
Human-Level Competitive Pokémon via Scalable Offline Reinforcement Learning with Transformers
Reinforcement Learning Conference (RLC), August 2025
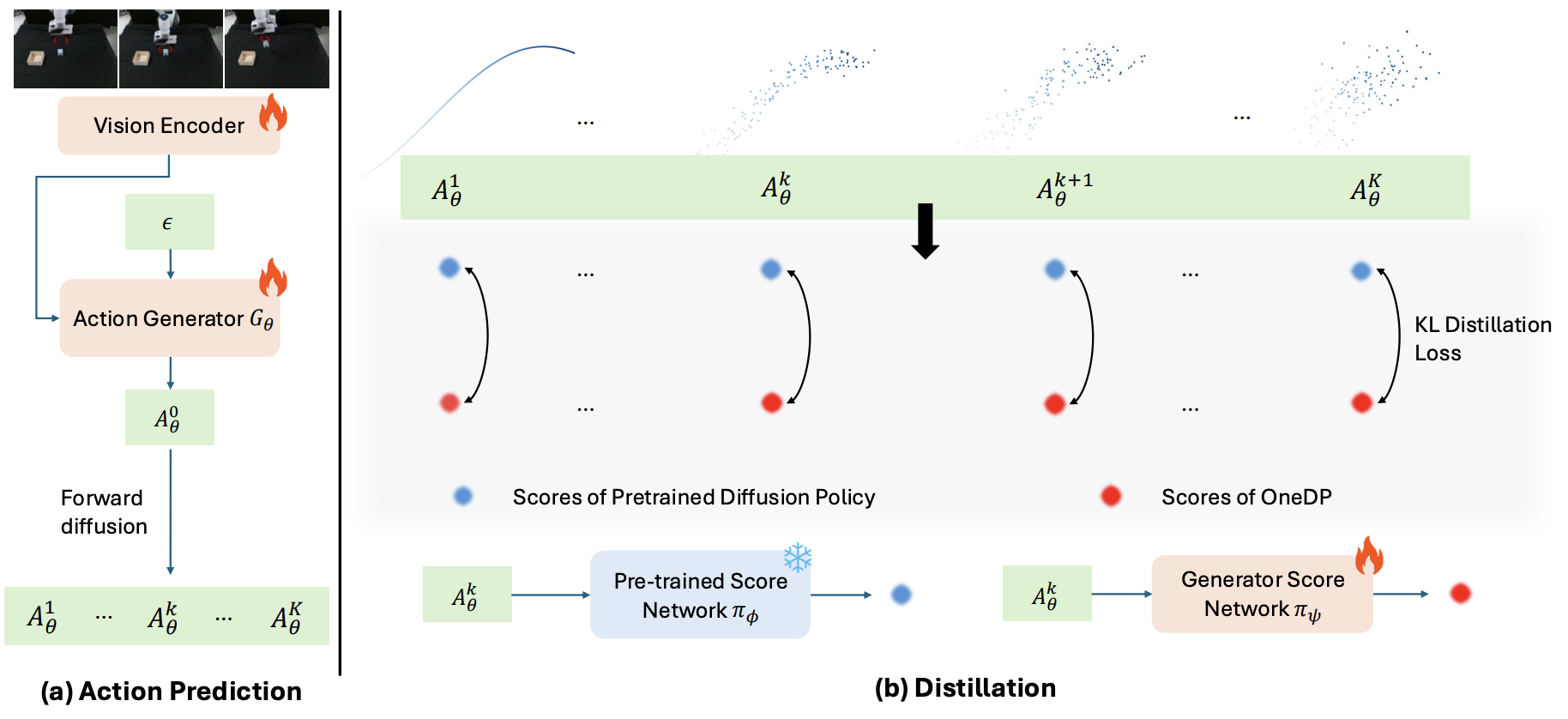
One-Step Diffusion Policy: Fast Visuomotor Policies via Diffusion Distillation
International Conference on Machine Learning (ICML), July 2025
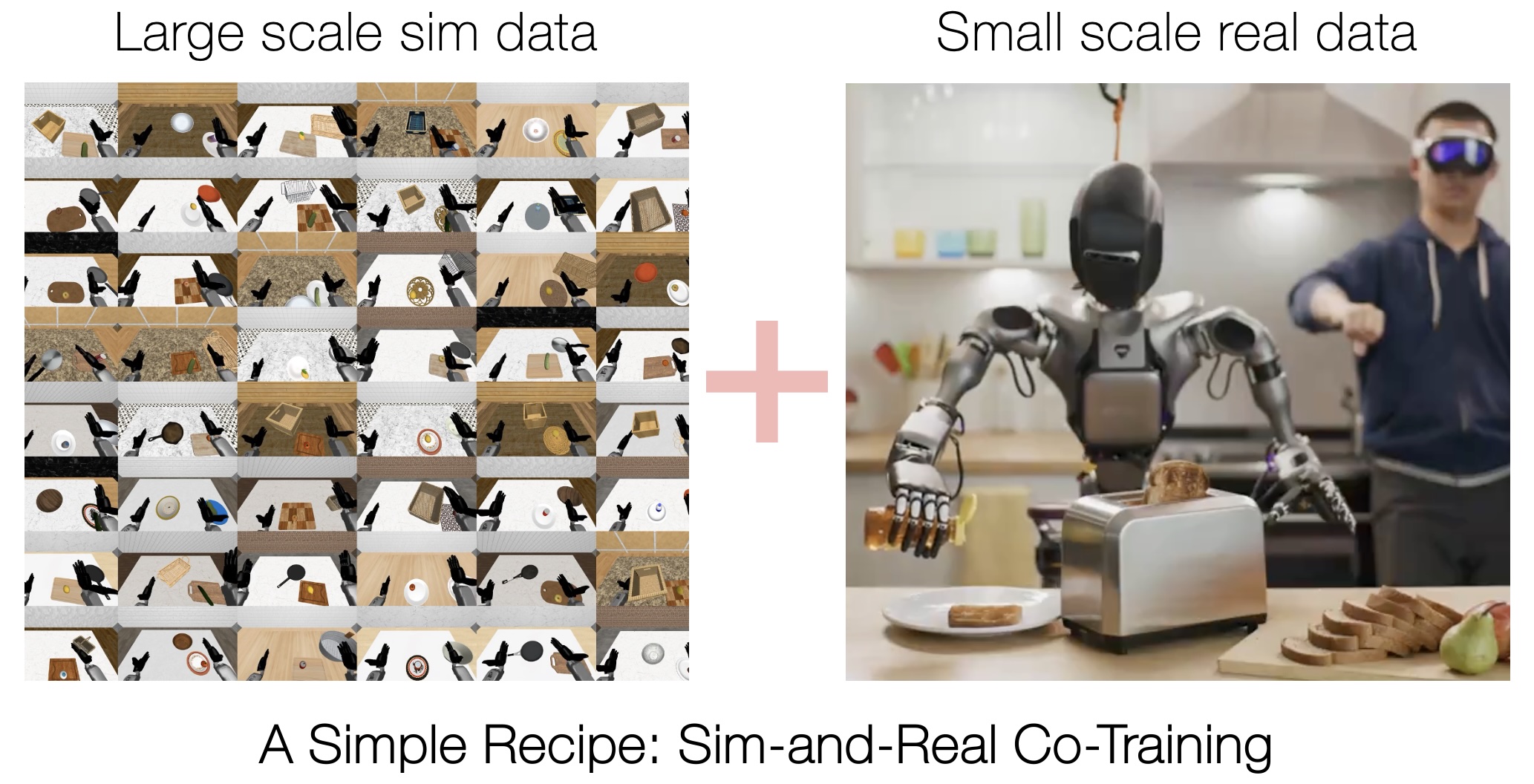
Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
Robotics: Science and Systems (RSS), June 2025
ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Robotics: Science and Systems (RSS), June 2025
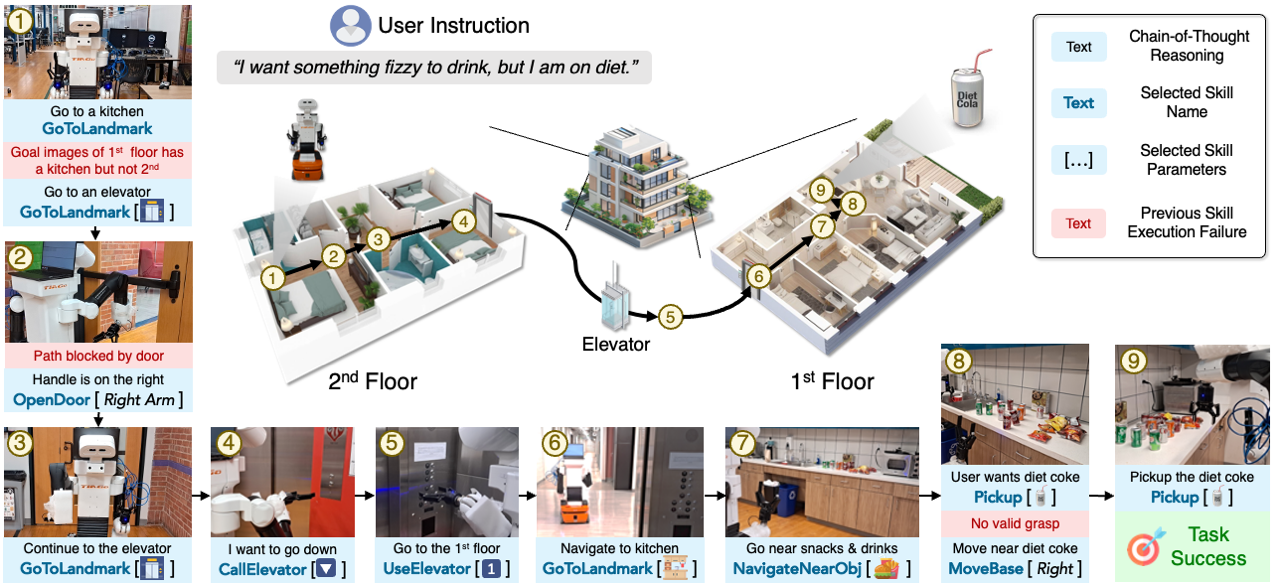
BUMBLE: Unifying Reasoning and Acting with Vision-Language Models for Building-wide Mobile Manipulation
IEEE International Conference on Robotics and Automation (ICRA), May 2025
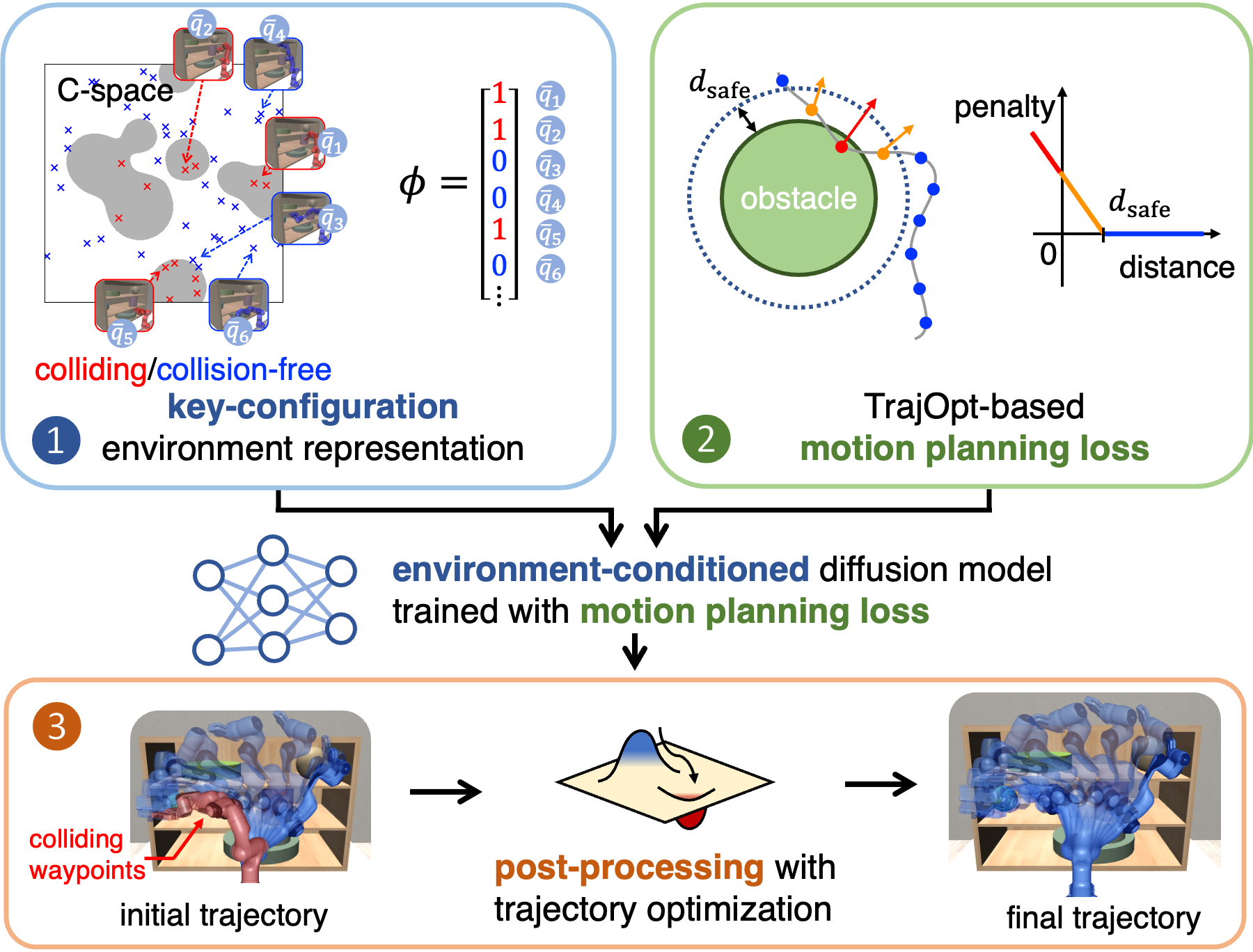
PRESTO: Fast Motion Planning Using Diffusion Models Based on Key-Configuration Environment Representation
IEEE International Conference on Robotics and Automation (ICRA), May 2025
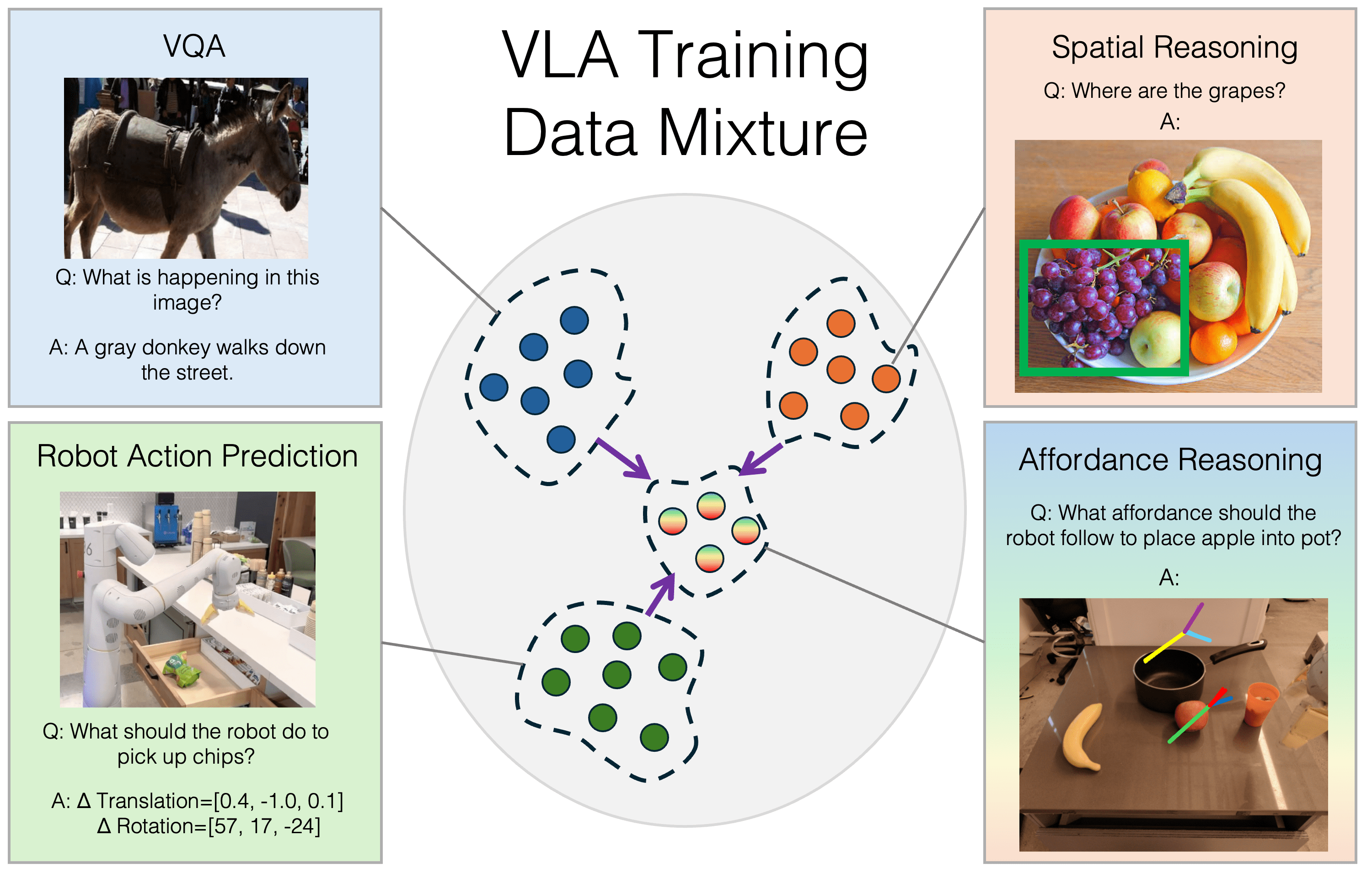
RT-Affordance: Affordances are Versatile Intermediate Representations for Robot Manipulation
IEEE International Conference on Robotics and Automation (ICRA), May 2025

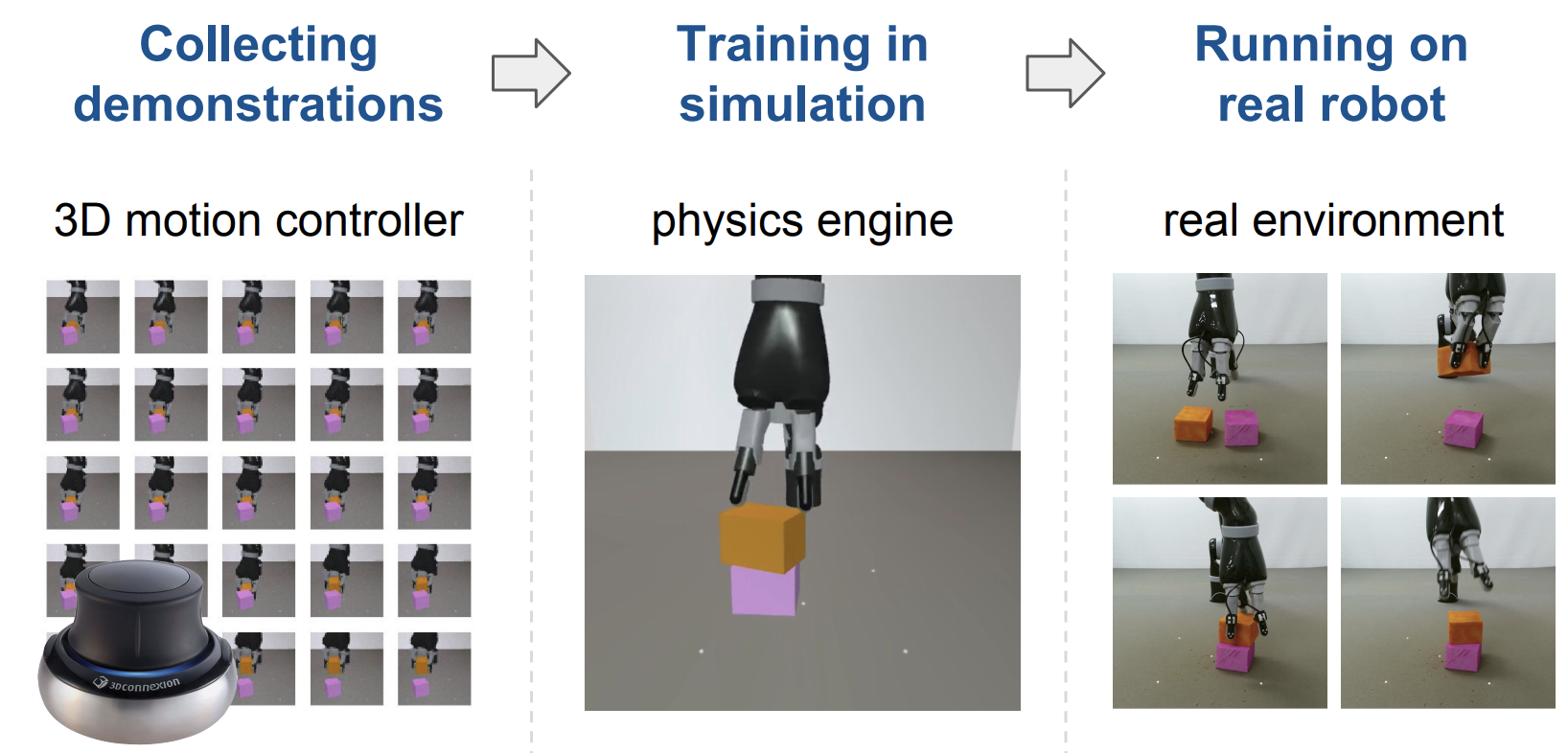
DexMimicGen: Automated Data Generation for Bimanual Dexterous Manipulation via Imitation Learning
IEEE International Conference on Robotics and Automation (ICRA), May 2025
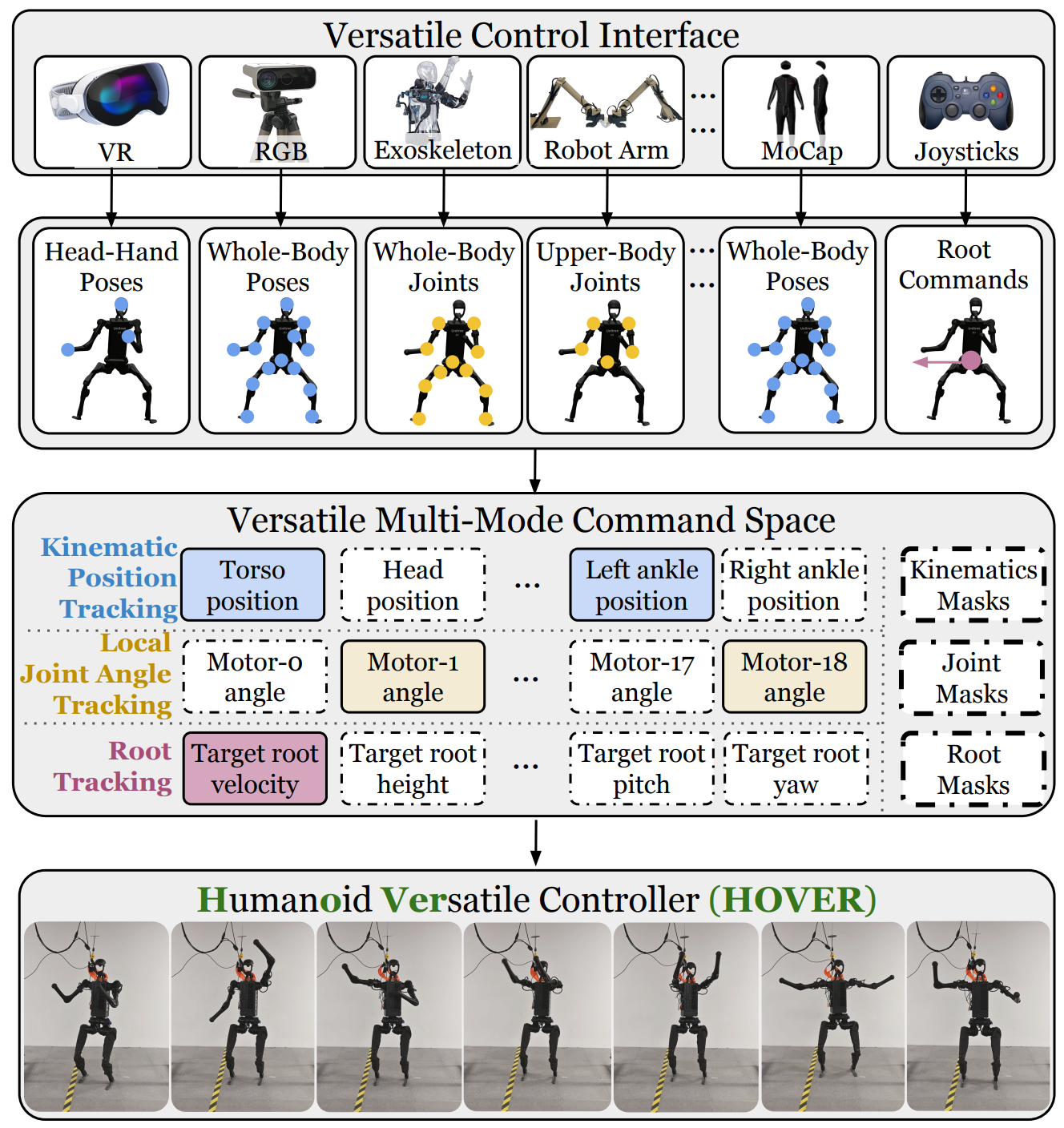
HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots
IEEE International Conference on Robotics and Automation (ICRA), May 2025
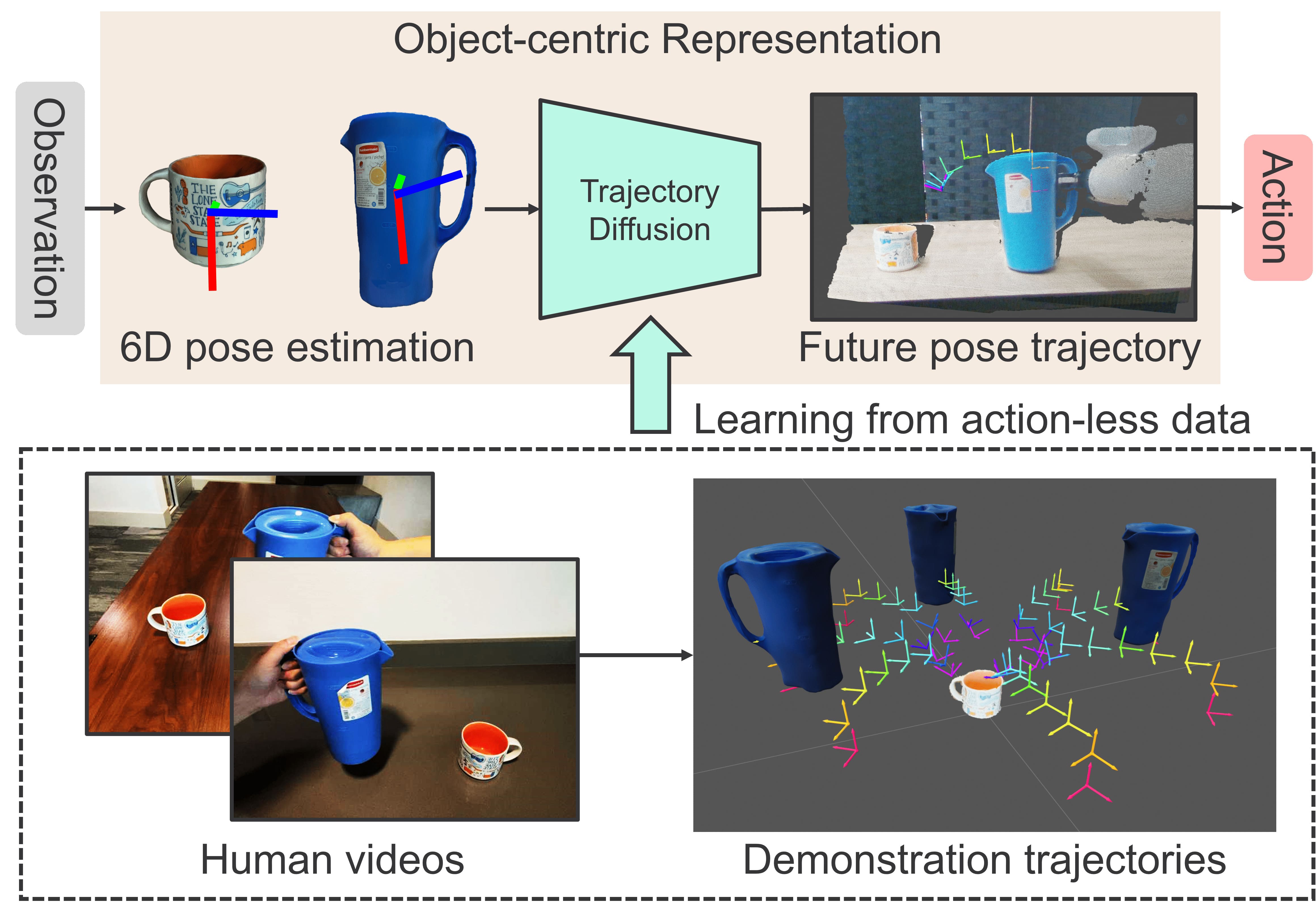
SPOT: SE(3) Pose Trajectory Diffusion for Object-Centric Manipulation
IEEE International Conference on Robotics and Automation (ICRA), May 2025

LongVILA: Scaling Long-Context Visual Language Models for Long Videos
International Conference on Learning Representations (ICLR), April 2025
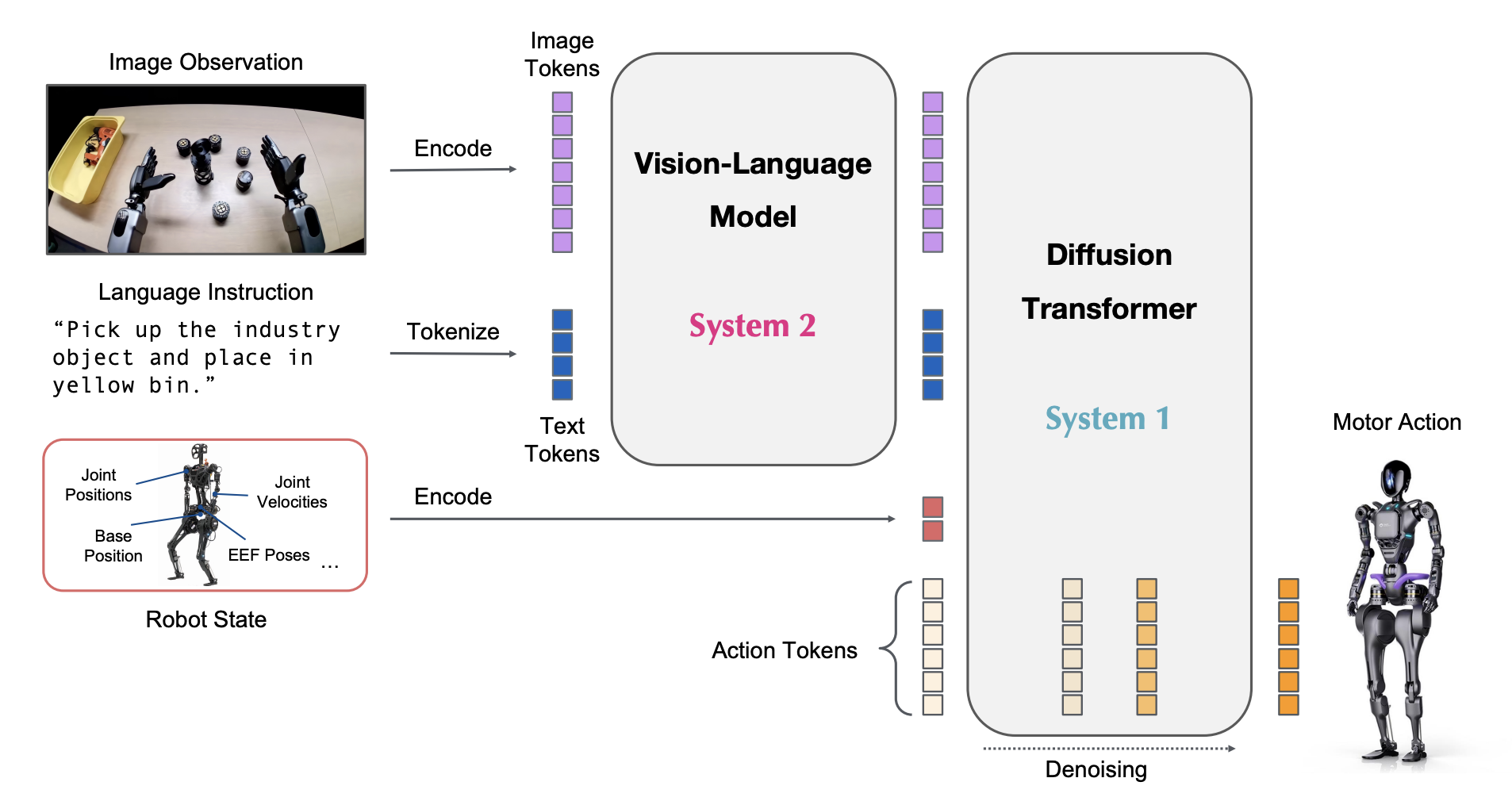
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Technical report arXiv:2503.14734, March 2025
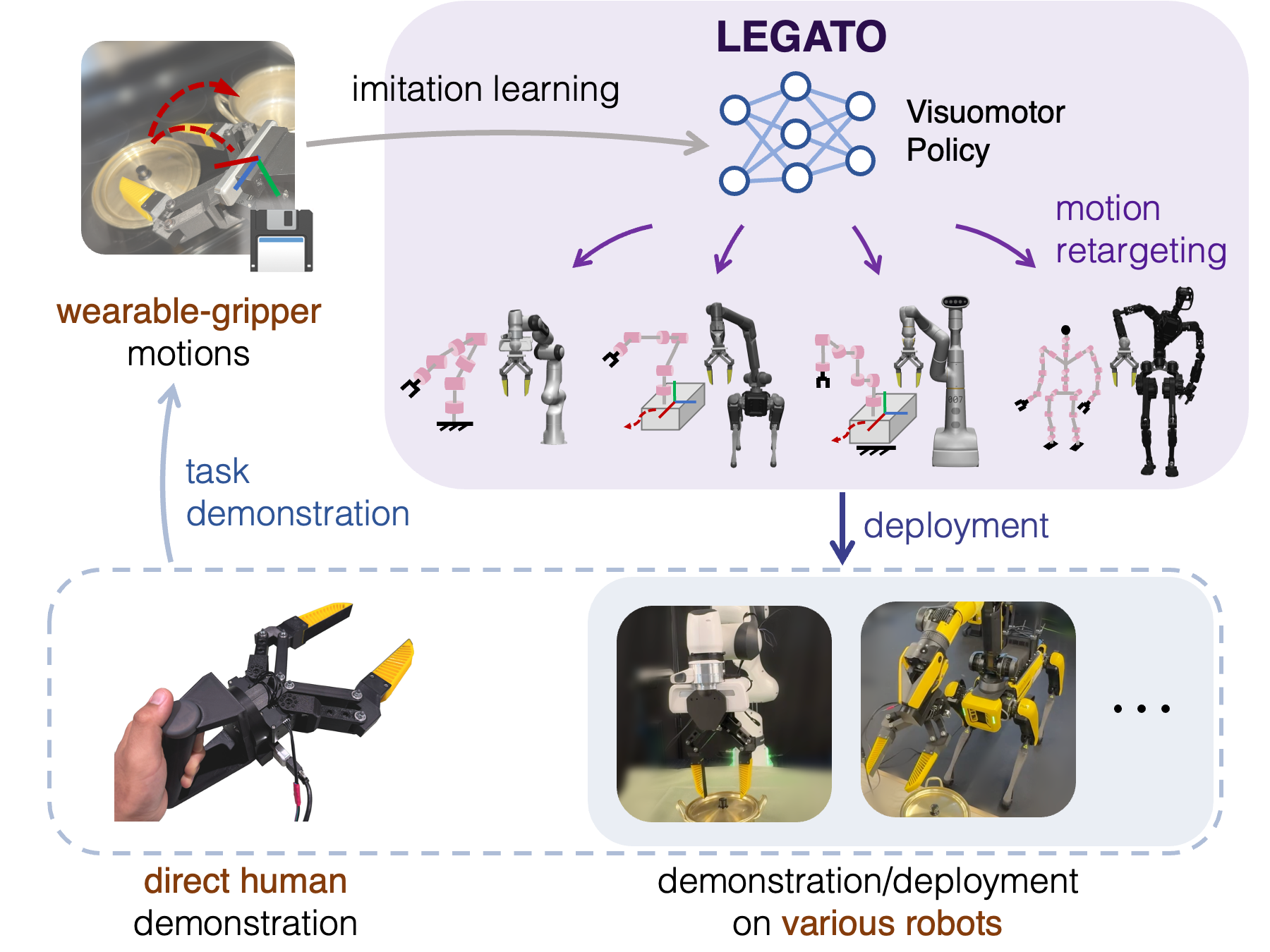
LEGATO: Cross-Embodiment Imitation Using a Grasping Tool
IEEE Robotics and Automation Letters (RA-L), March 2025
2024

AMAGO-2: Breaking the Multi-Task Barrier in Meta-Reinforcement Learning with Transformers
Conference on Neural Information Processing Systems (NeurIPS), December 2024
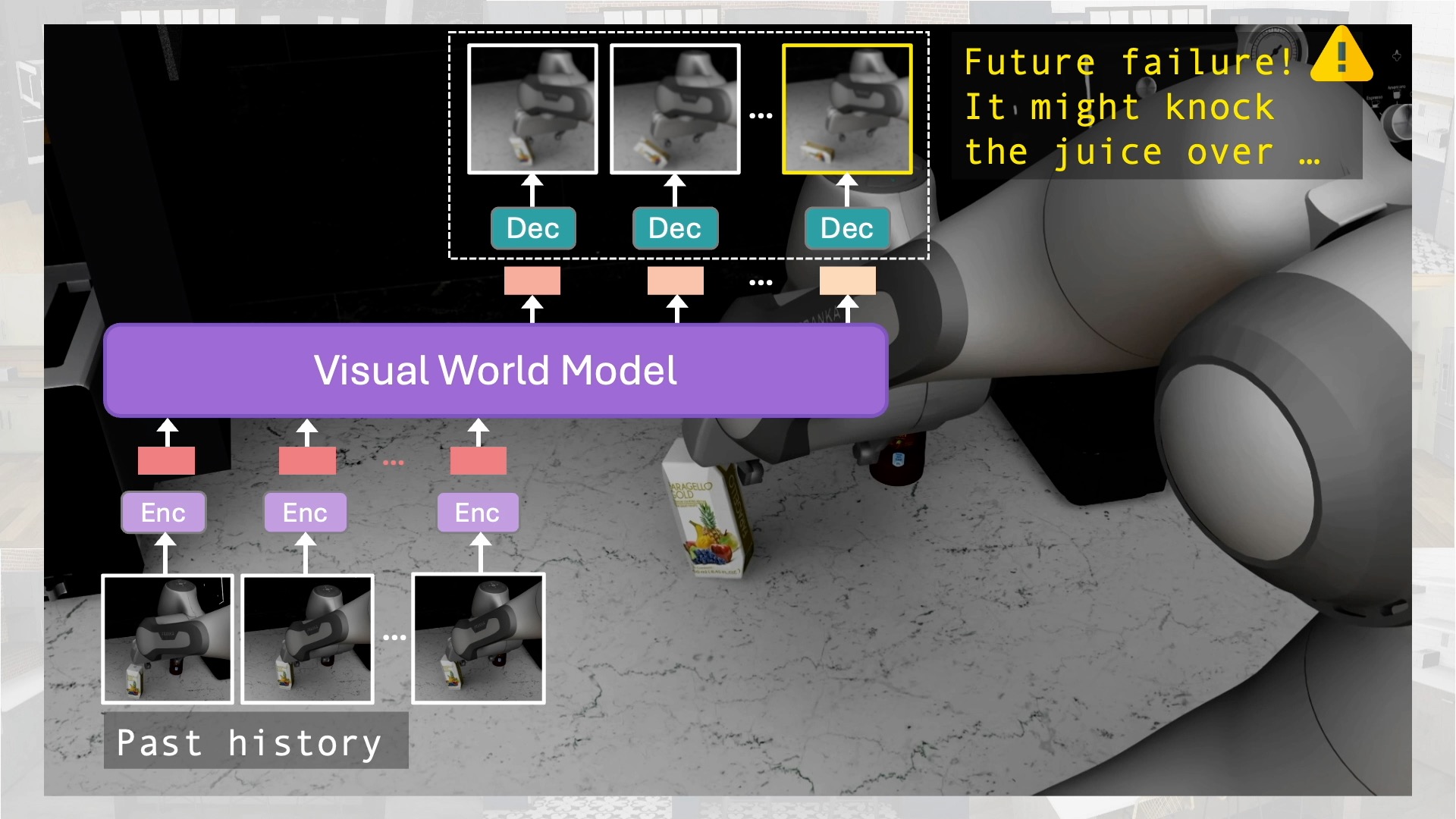
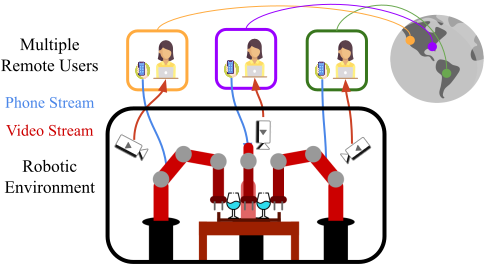
Multi-Task Interactive Robot Fleet Learning with Visual World Models
Conference on Robot Learning (CoRL), November 2024
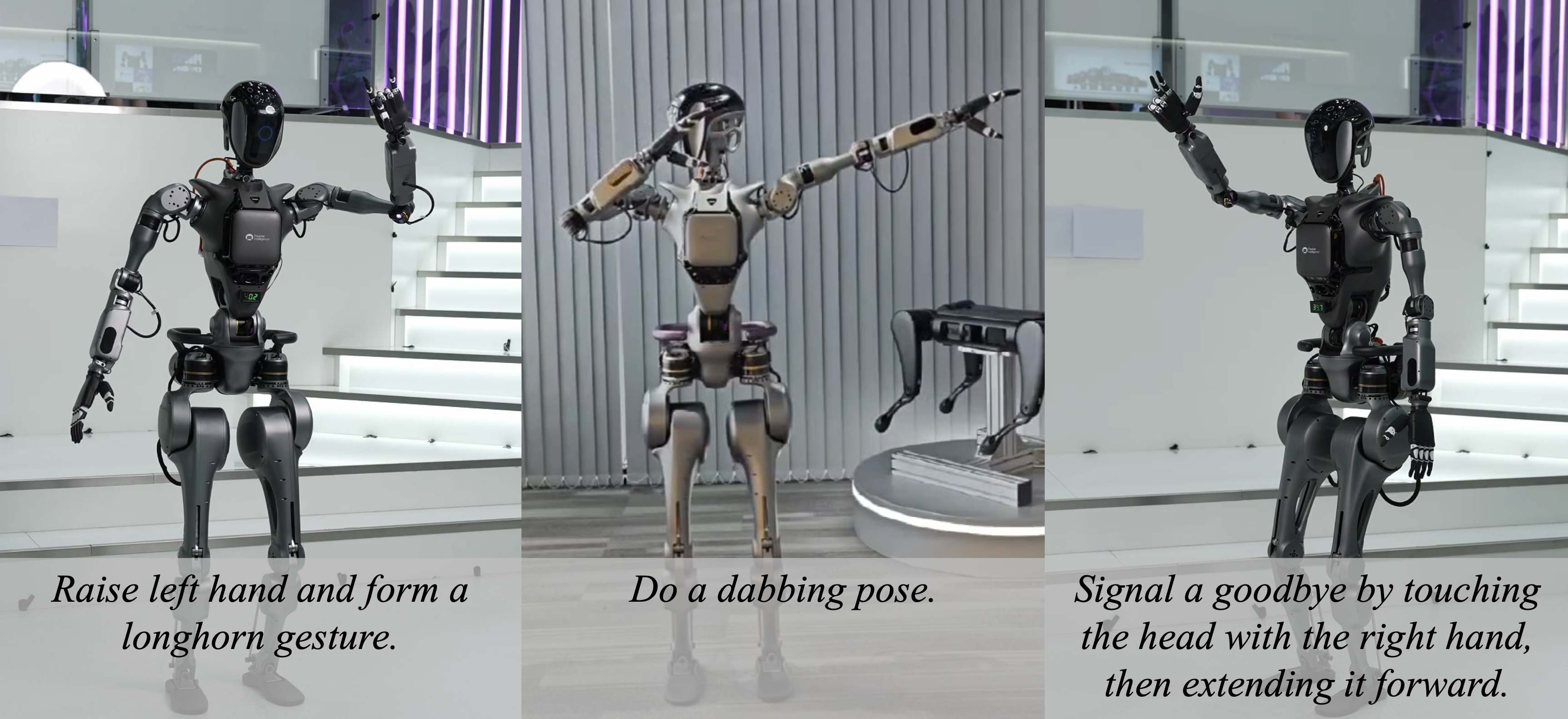
Harmon: Whole-Body Motion Generation of Humanoid Robots from Language Descriptions
Conference on Robot Learning (CoRL), November 2024
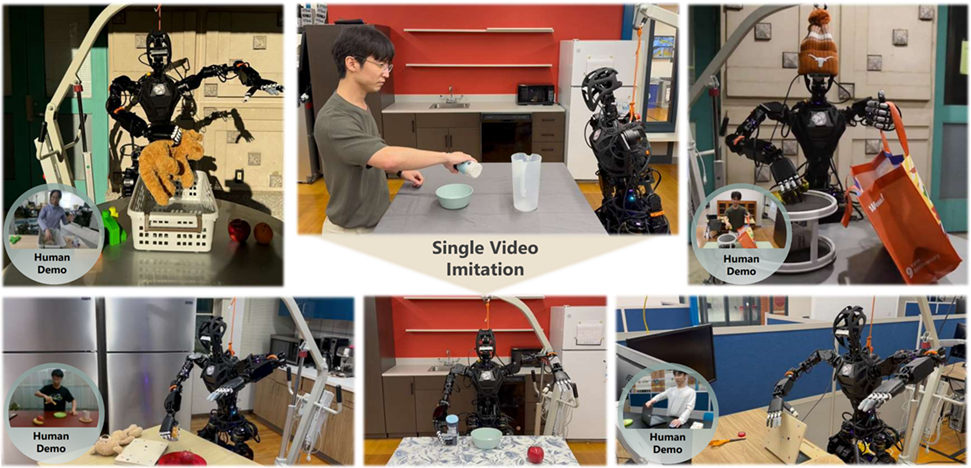
OKAMI: Teaching Humanoid Robots Manipulation Skills through Single Video Imitation
Conference on Robot Learning (CoRL), November 2024
Oral Presentation
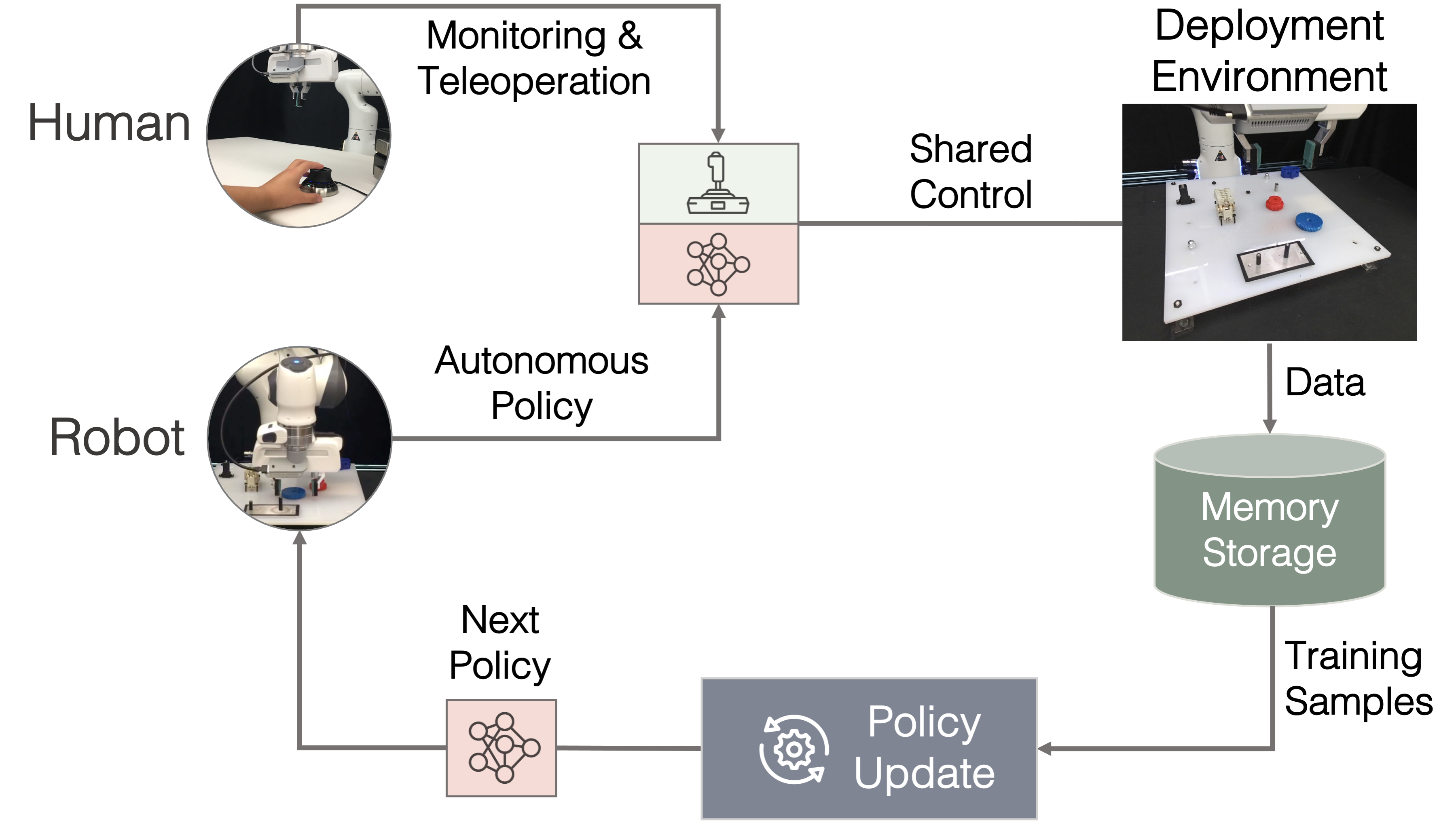
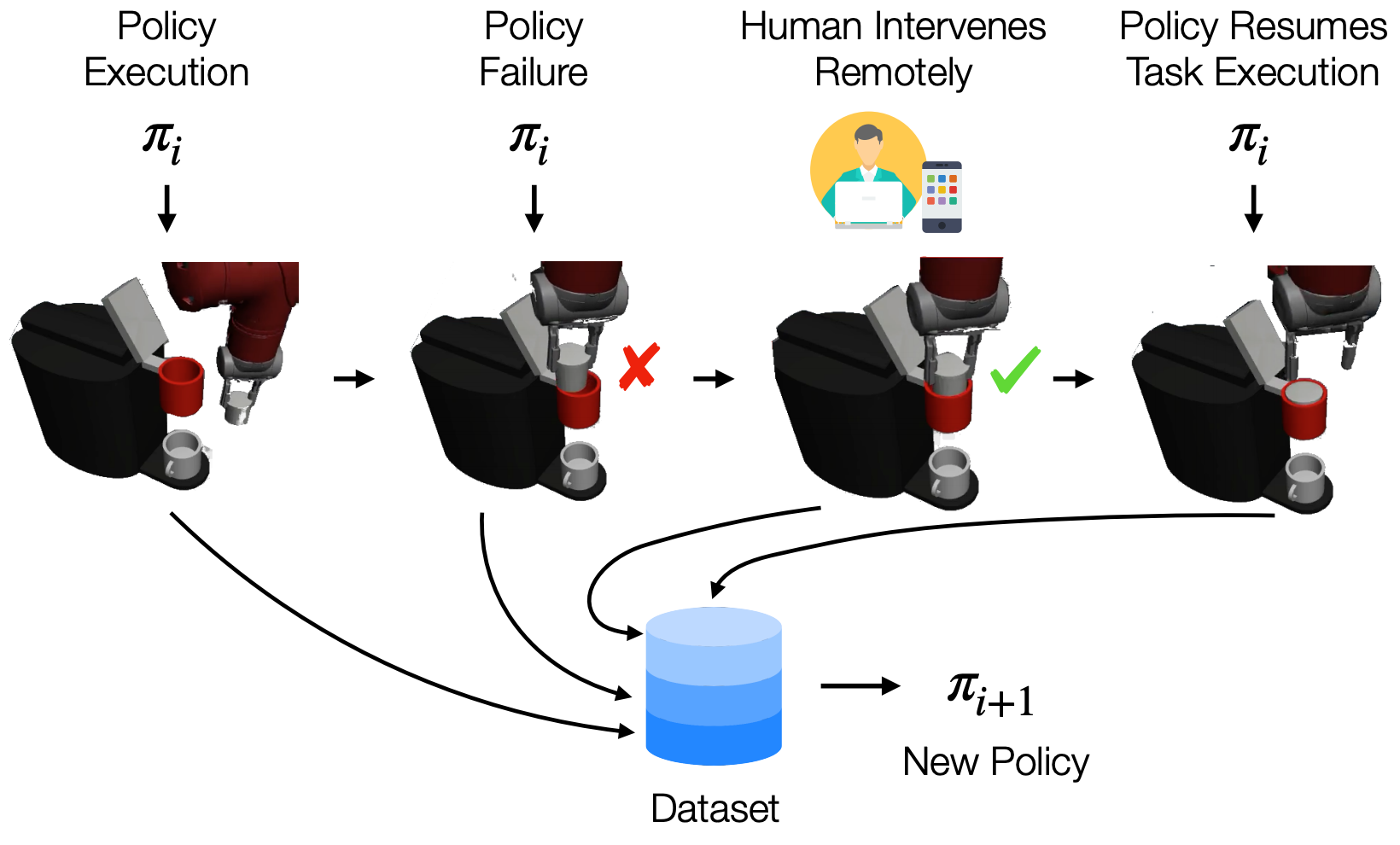
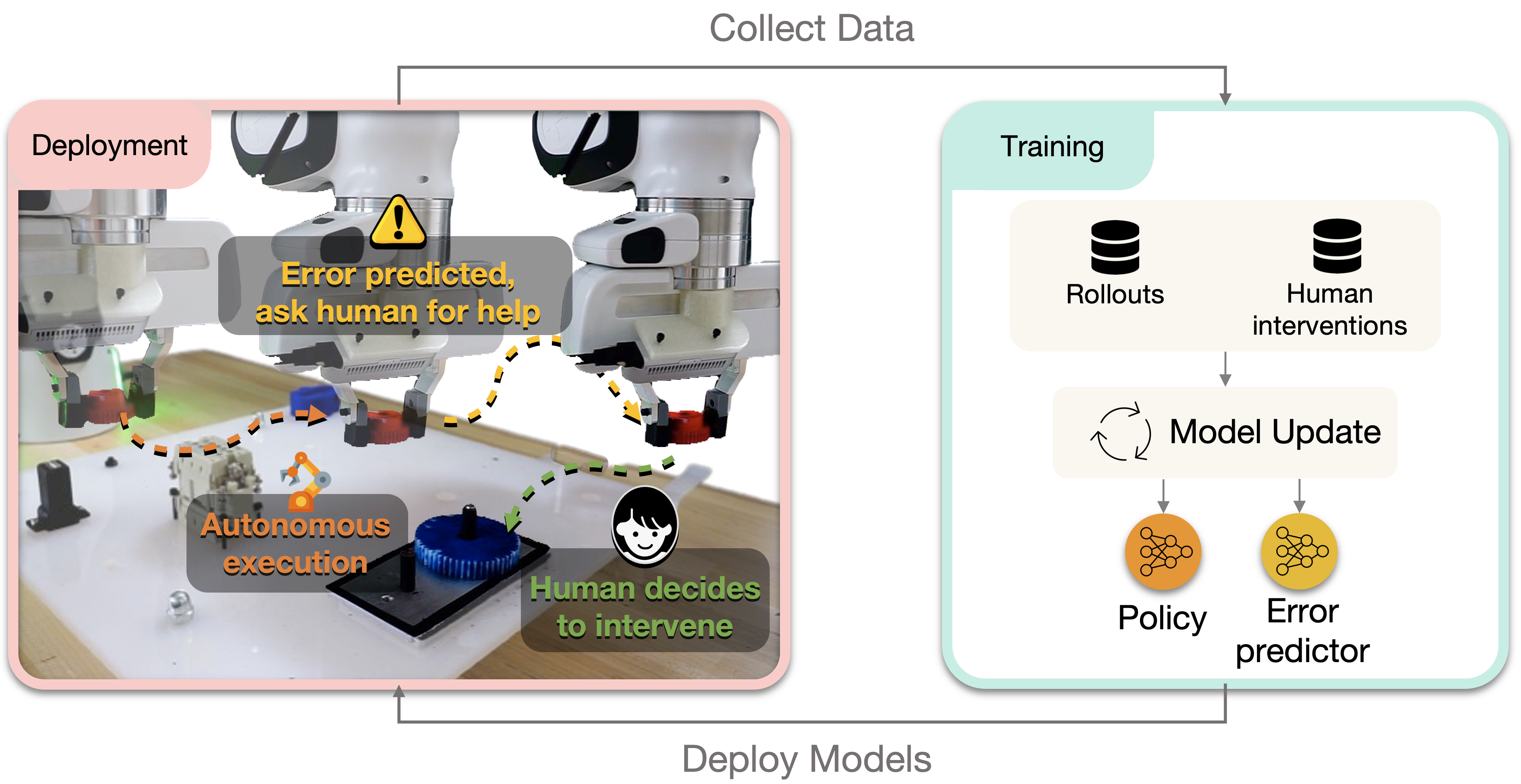
Robot Learning on the Job: Human-in-the-Loop Autonomy and Learning During Deployment
International Journal of Robotics Research (IJRR), Oct 2024
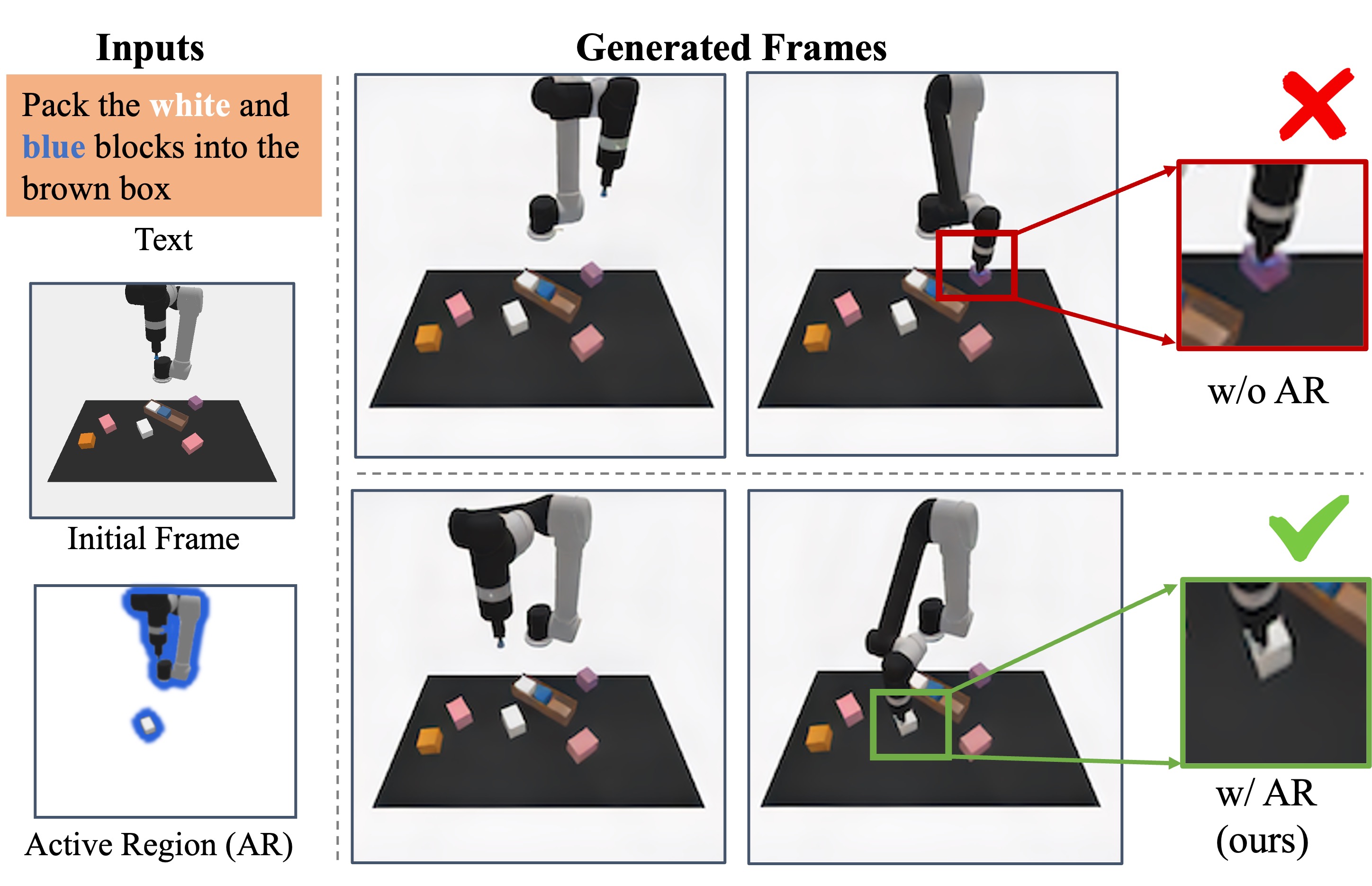
ARDuP: Active Region Video Diffusion for Universal Policies
International Conference on Intelligent Robots and Systems (IROS), October 2024
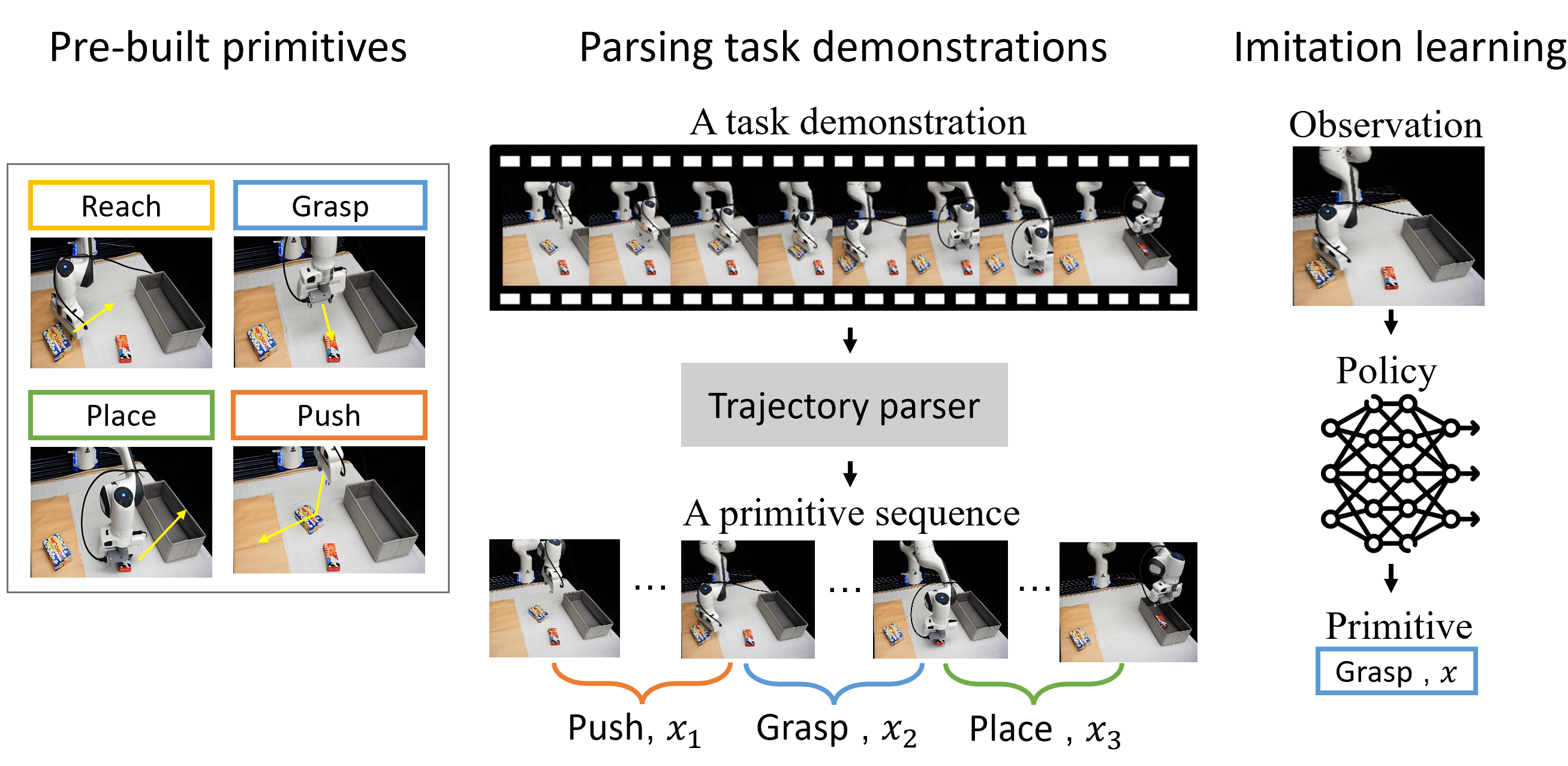
PRIME: Scaffolding Manipulation Tasks with Behavior Primitives for Data-Efficient Imitation Learning
IEEE Robotics and Automation Letters (RA-L), October 2024
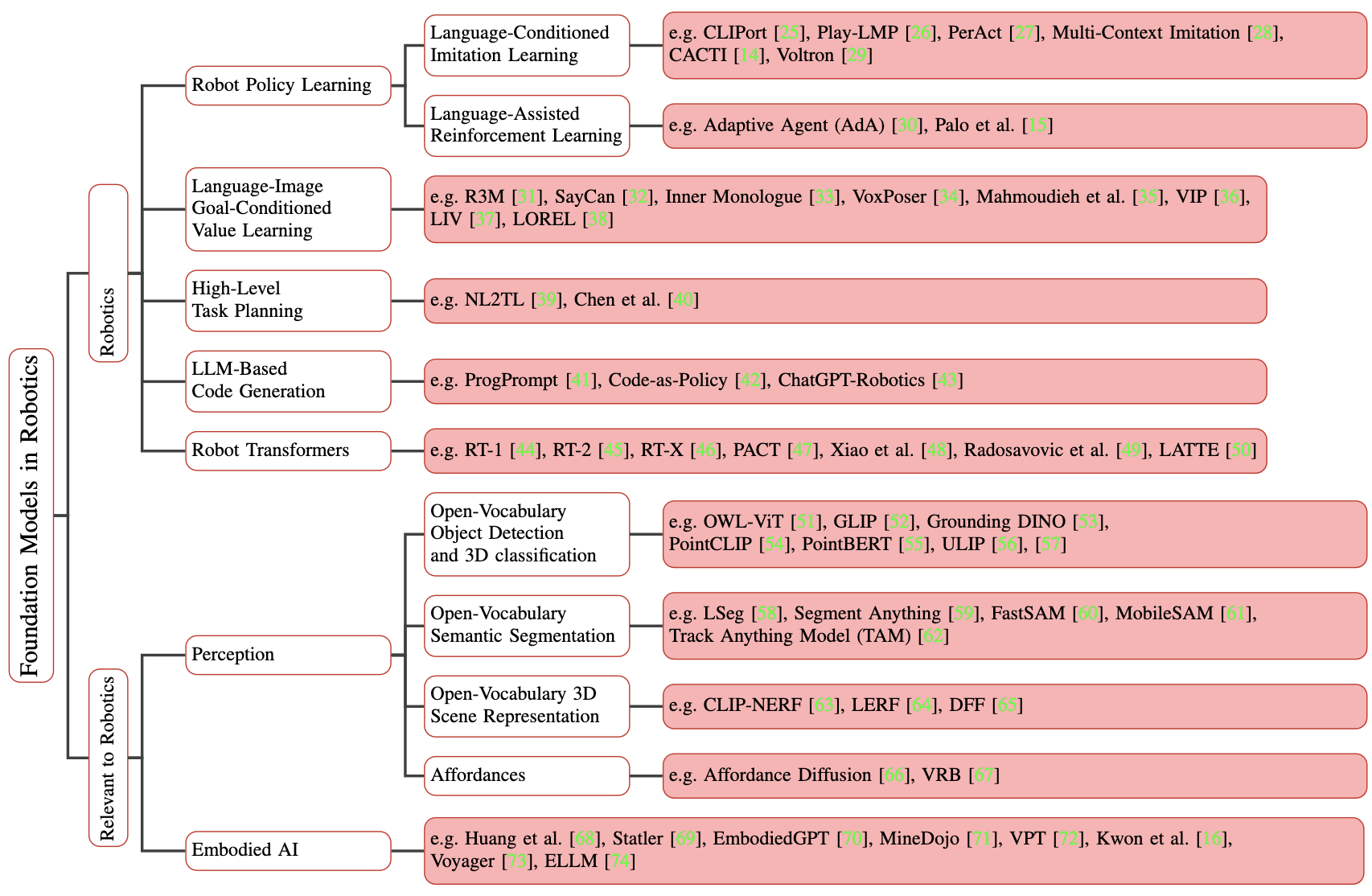
Foundation Models in Robotics: Applications, Challenges, and the Future
International Journal of Robotics Research (IJRR), September 2024
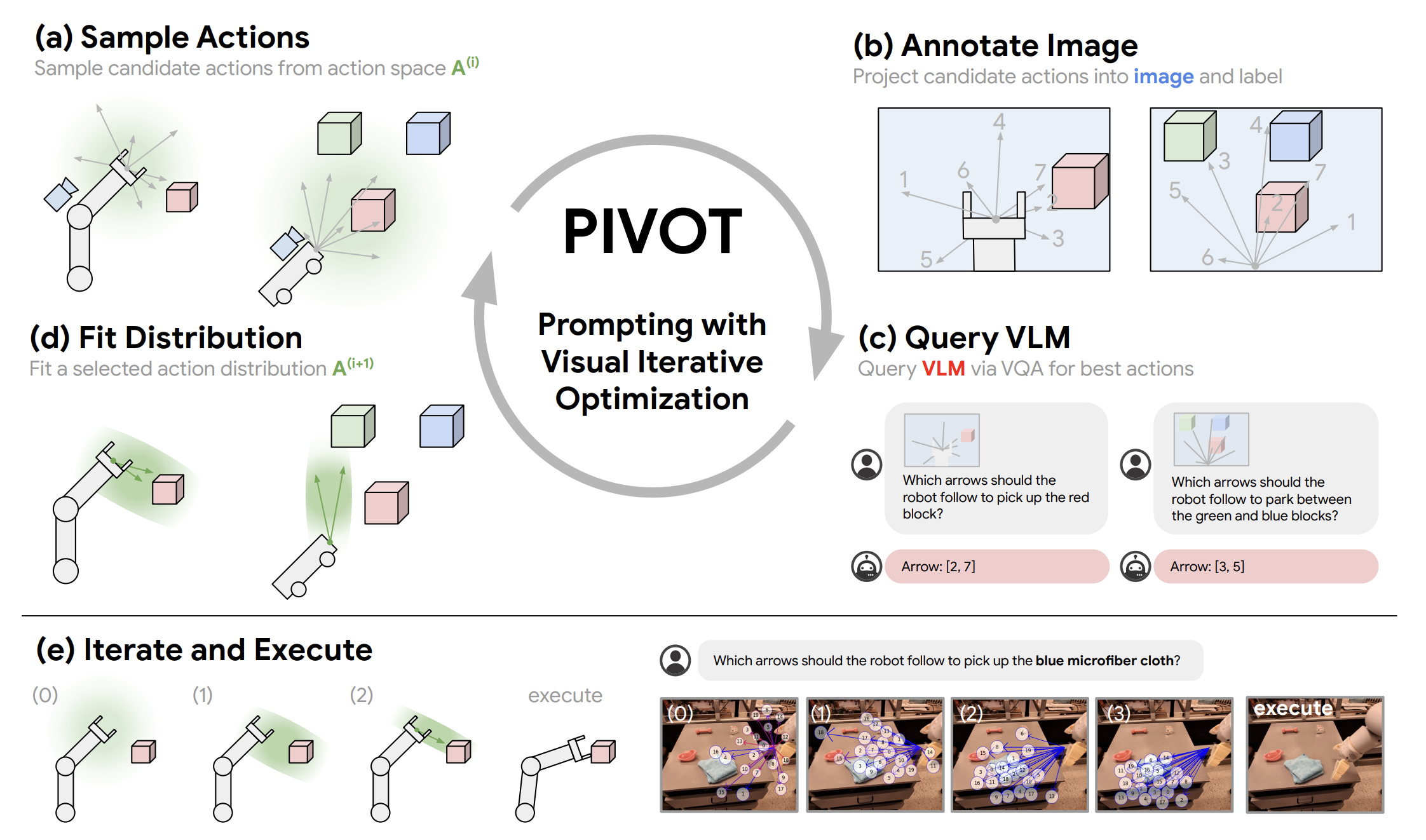
PIVOT: Iterative Visual Prompting Elicits Actionable Knowledge for VLMs
International Conference on Machine Learning (ICML), July 2024
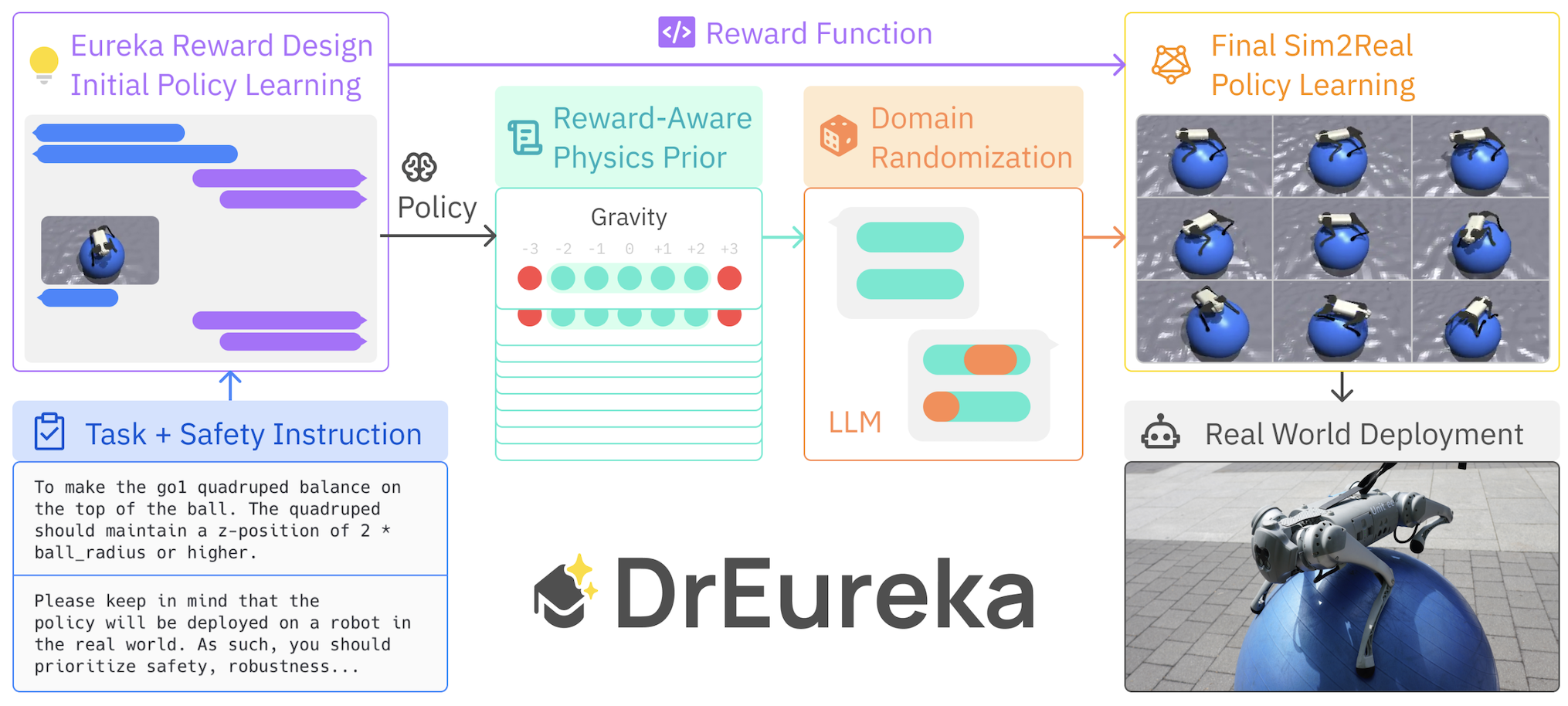
DrEureka: Language Model Guided Sim-To-Real Transfer
Robotics: Science and Systems (RSS), July 2024

InterPreT: Interactive Predicate Learning from Language Feedback for Generalizable Task Planning
Robotics: Science and Systems (RSS), July 2024

DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Robotics: Science and Systems (RSS), July 2024

RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Robotics: Science and Systems (RSS), July 2024
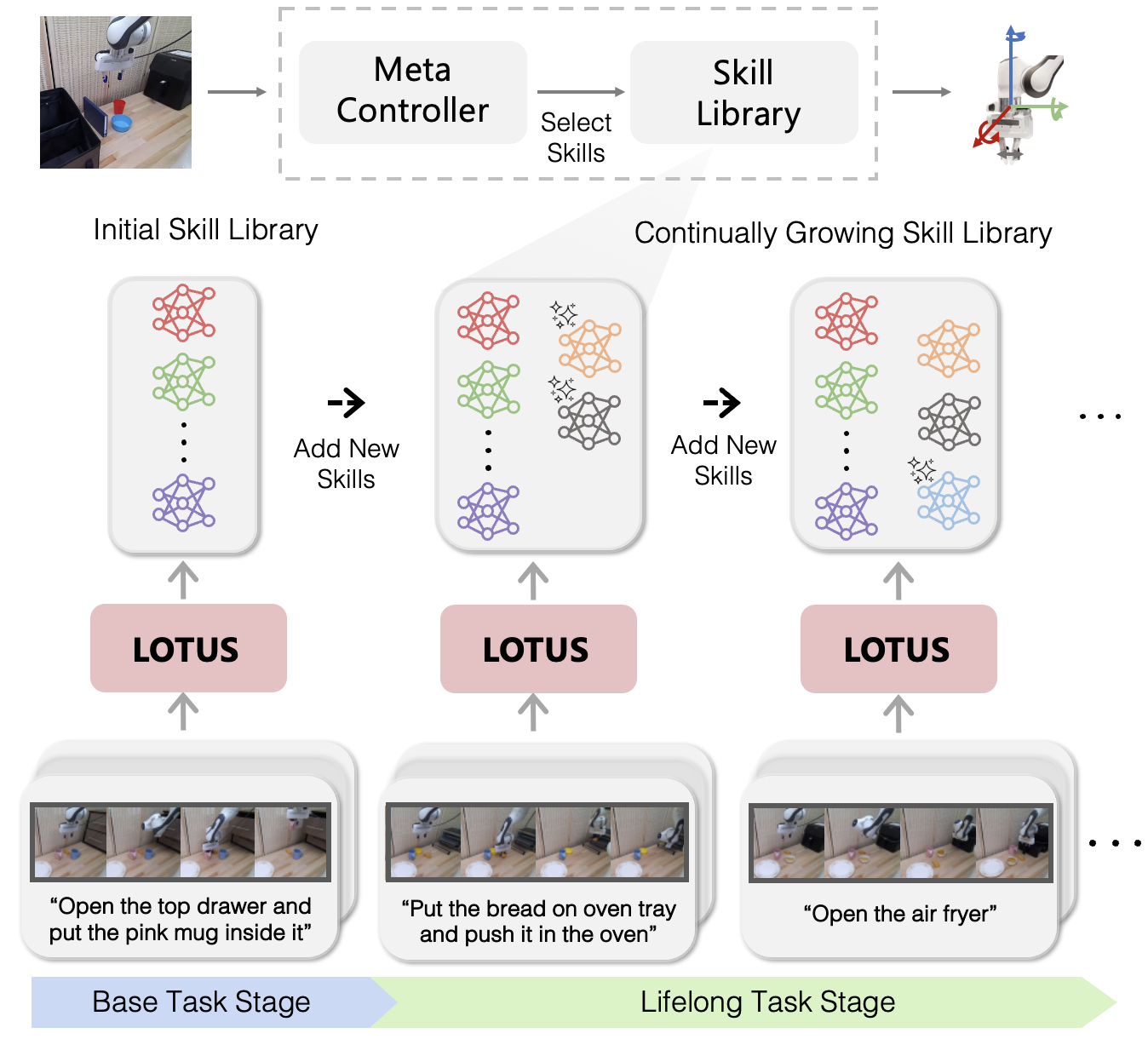
LOTUS: Continual Imitation Learning for Robot Manipulation Through Unsupervised Skill Discovery
IEEE International Conference on Robotics and Automation (ICRA), May 2024
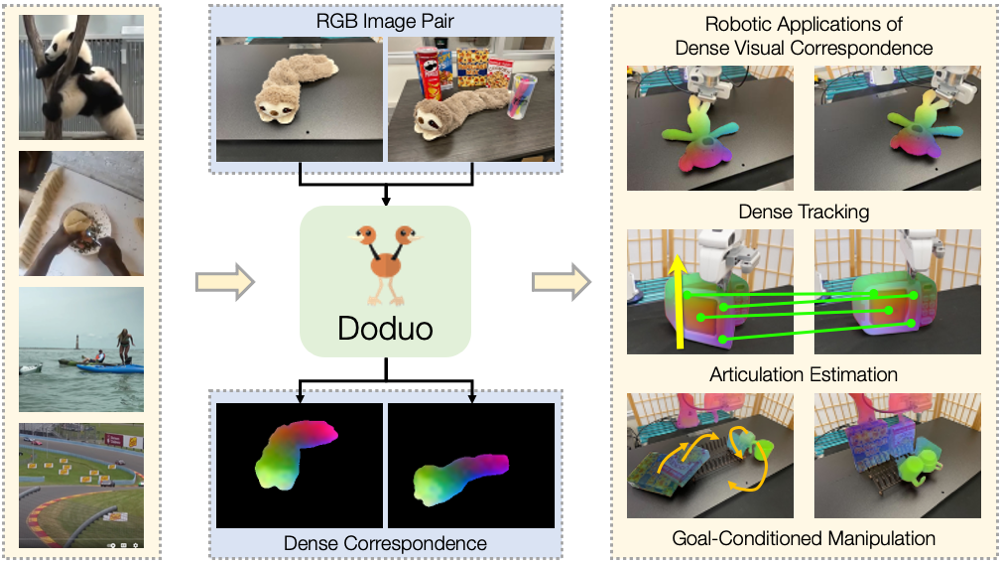
Doduo: Dense Visual Correspondence from Unsupervised Semantic-Aware Flow
IEEE International Conference on Robotics and Automation (ICRA), May 2024
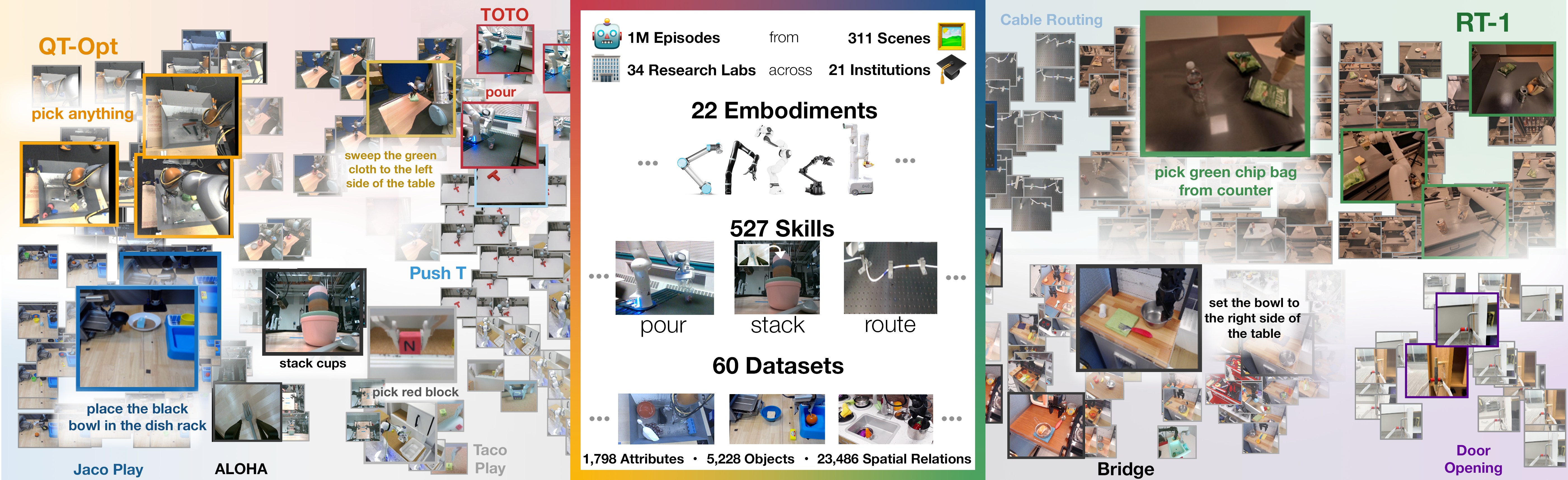
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
IEEE International Conference on Robotics and Automation (ICRA), May 2024
Best Conference Paper Award
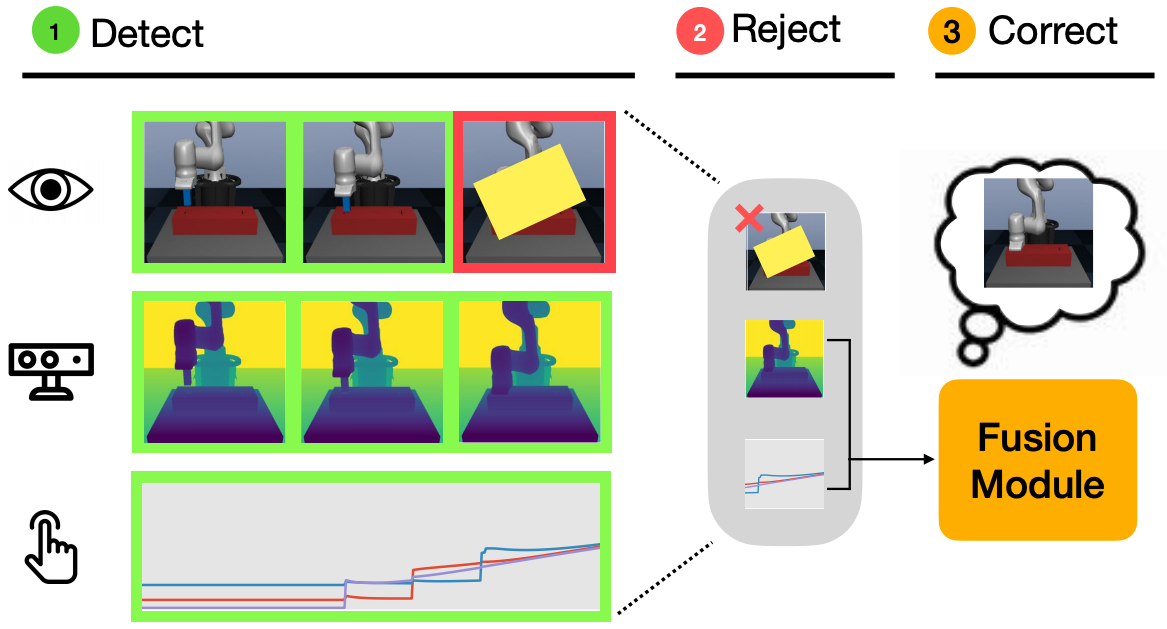
Model-Based Runtime Monitoring with Interactive Imitation Learning
IEEE International Conference on Robotics and Automation (ICRA), May 2024
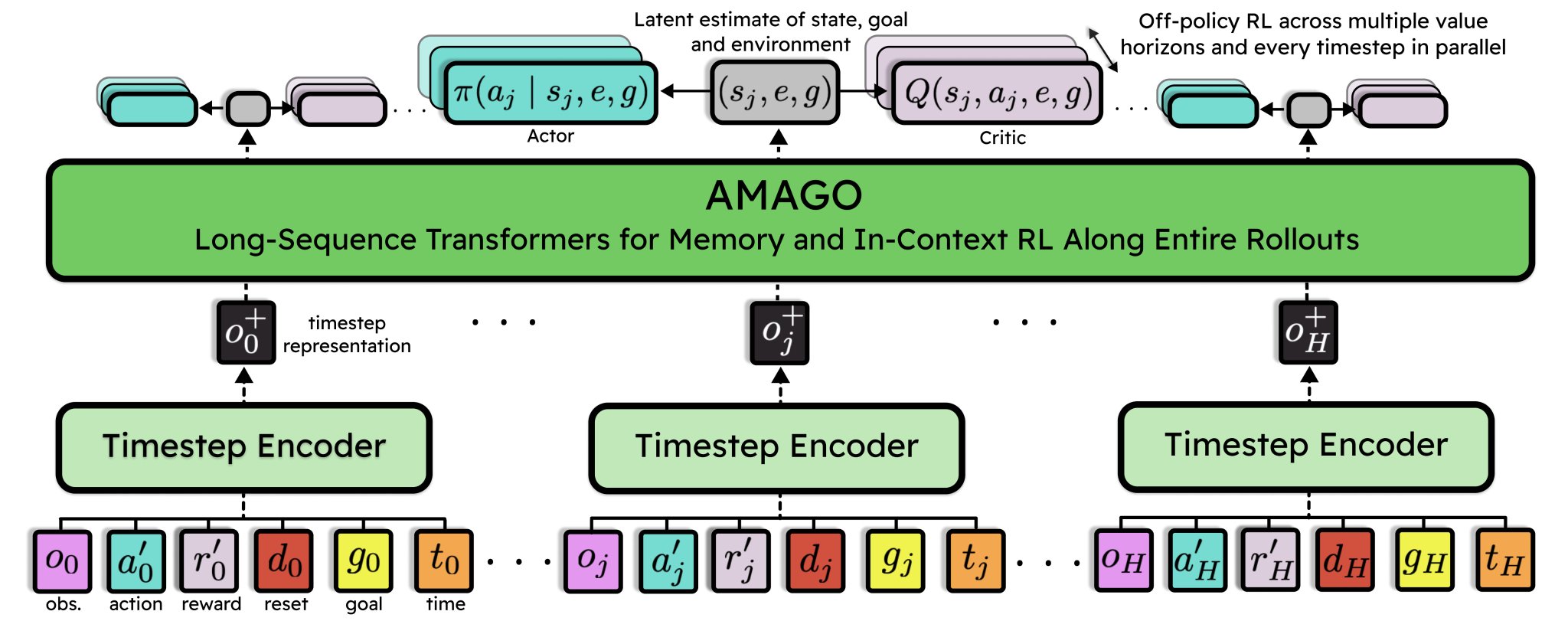
AMAGO: Scalable In-Context Reinforcement Learning for Adaptive Agents
International Conference on Learning Representations (ICLR), May 2024
Spotlight Presentation
Eureka: Human-Level Reward Design via Coding Large Language Models
International Conference on Learning Representations (ICLR), May 2024
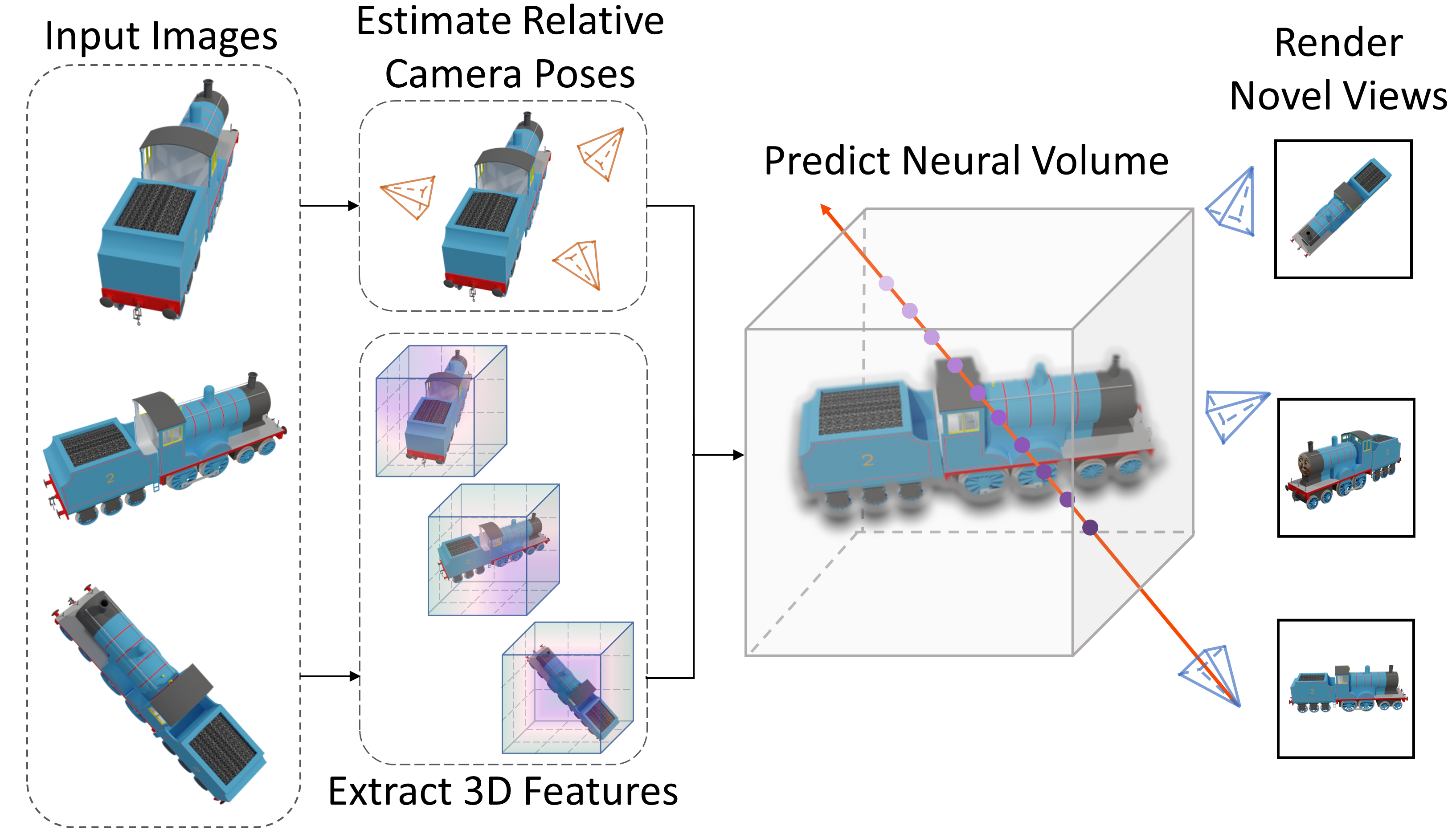
Few-View Object Reconstruction with Unknown Categories and Camera Poses
International Conference on 3D Vision (3DV), March 2024
Oral Presentation
Granger Causal Interaction Skill Chains
Transactions on Machine Learning Research (TMLR), March 2024

Voyager: An Open-Ended Embodied Agent with Large Language Models
Transactions on Machine Learning Research (TMLR), March 2024
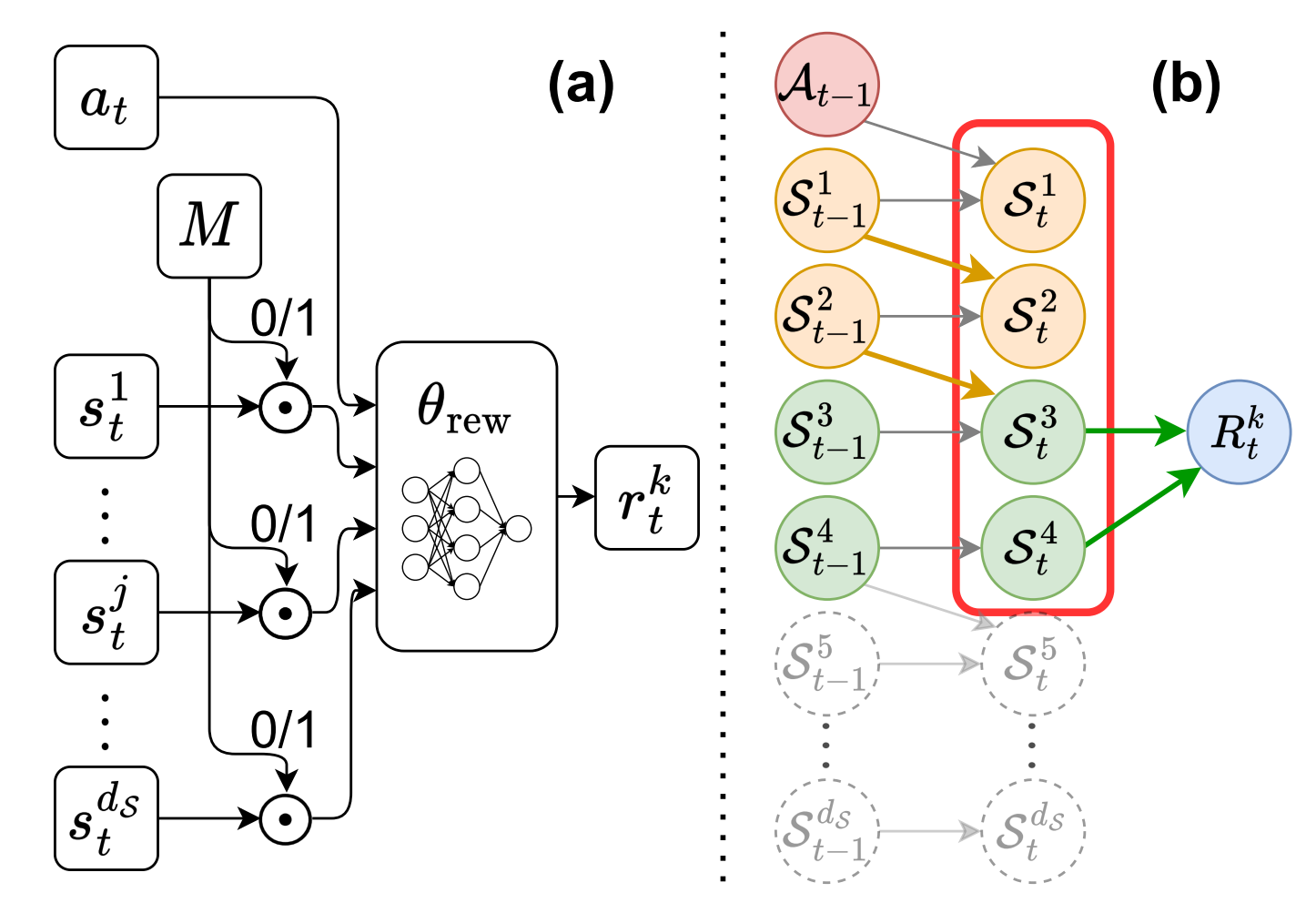
Building Minimal and Reusable Causal State Abstractions for Reinforcement Learning
AAAI Conference on Artificial Intelligence (AAAI), February 2024
Oral Presentation
2023
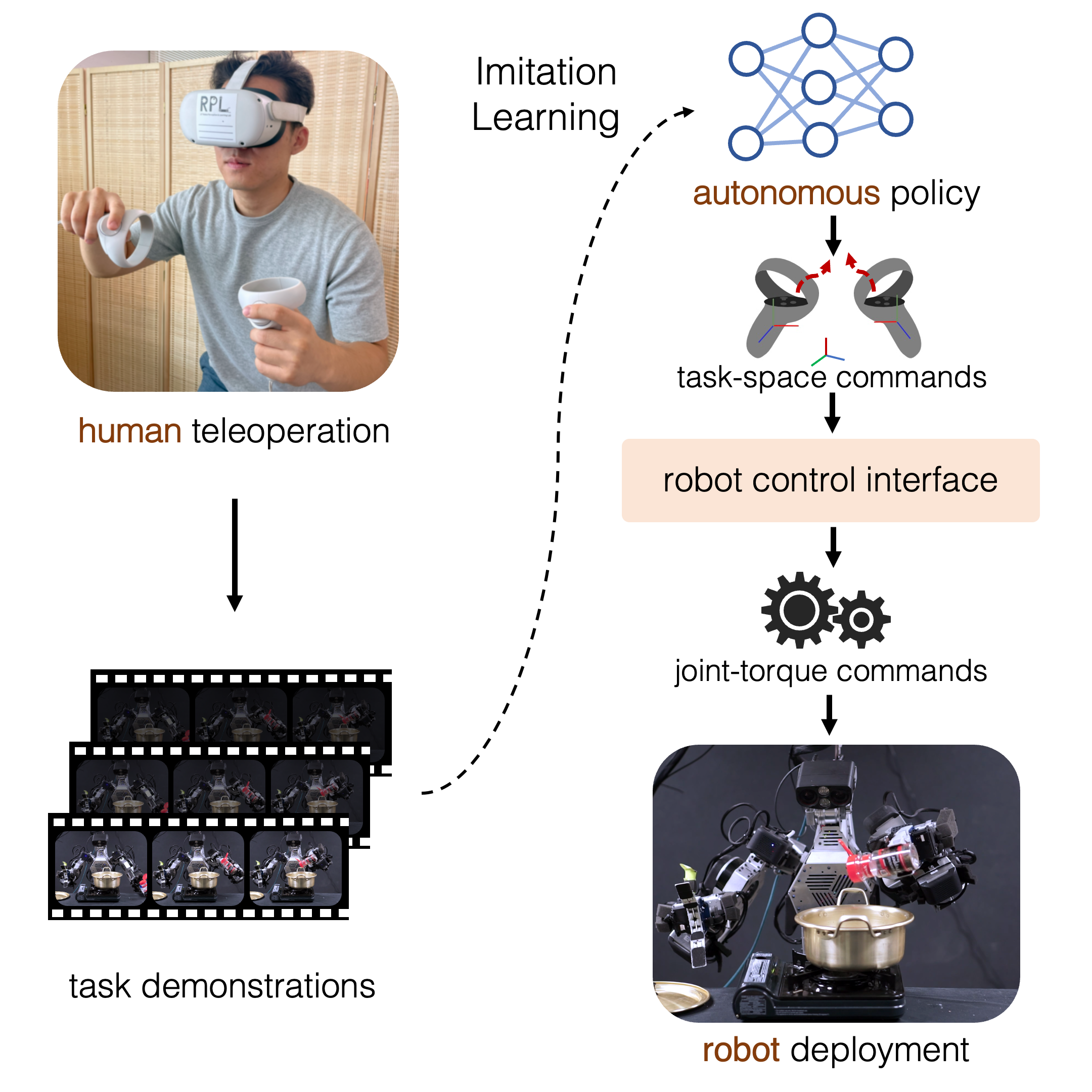
Deep Imitation Learning for Humanoid Loco-manipulation through Human Teleoperation
International Conference on Humanoid Robots (Humanoids), December 2023
Oral Presentation
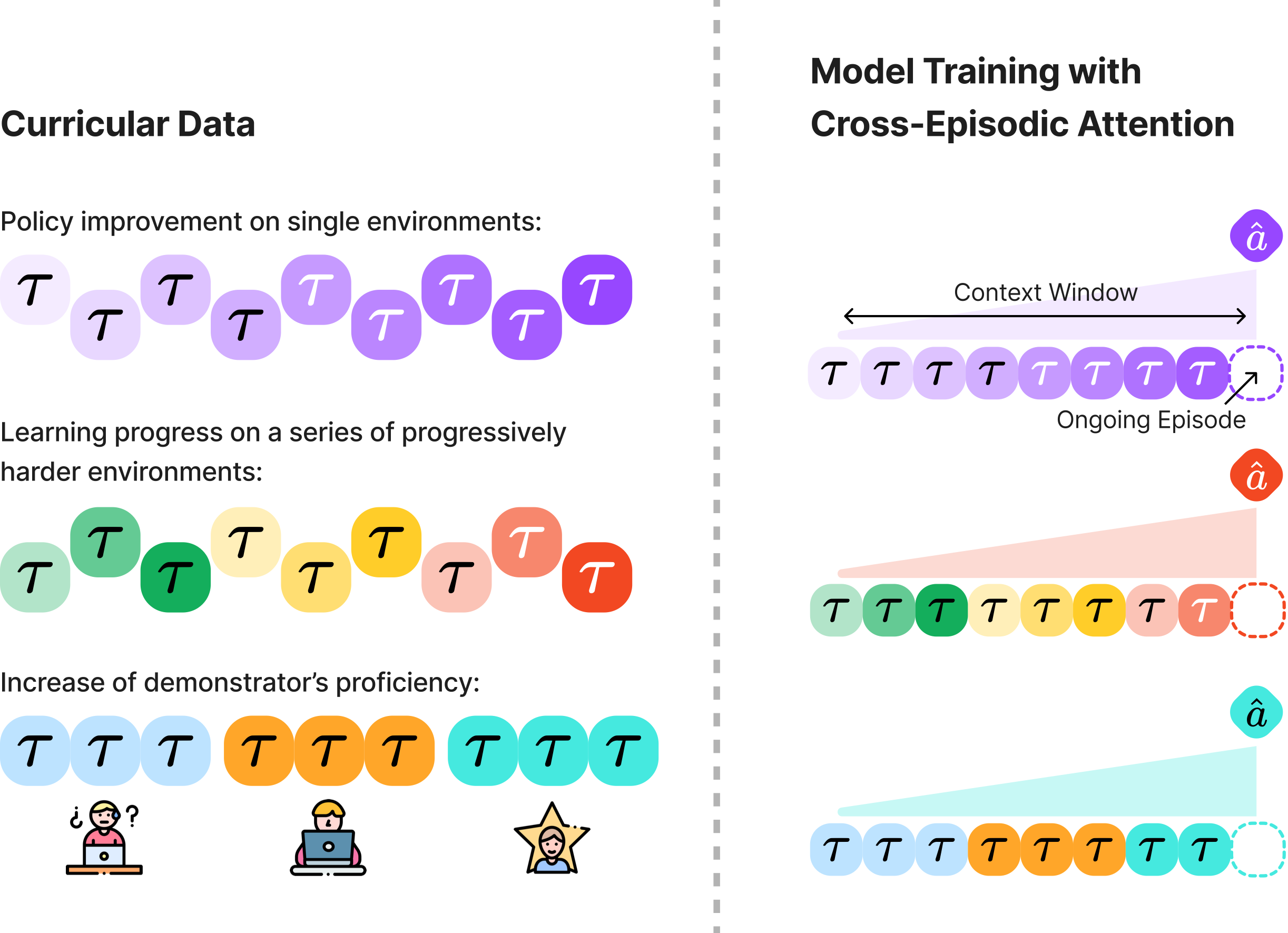
Cross-Episodic Curriculum for Transformer Agents
Conference on Neural Information Processing Systems (NeurIPS), December 2023

LIBERO: Benchmarking Knowledge Transfer in Lifelong Robot Learning
NeurIPS 2023 Datasets and Benchmarks Track, December 2023
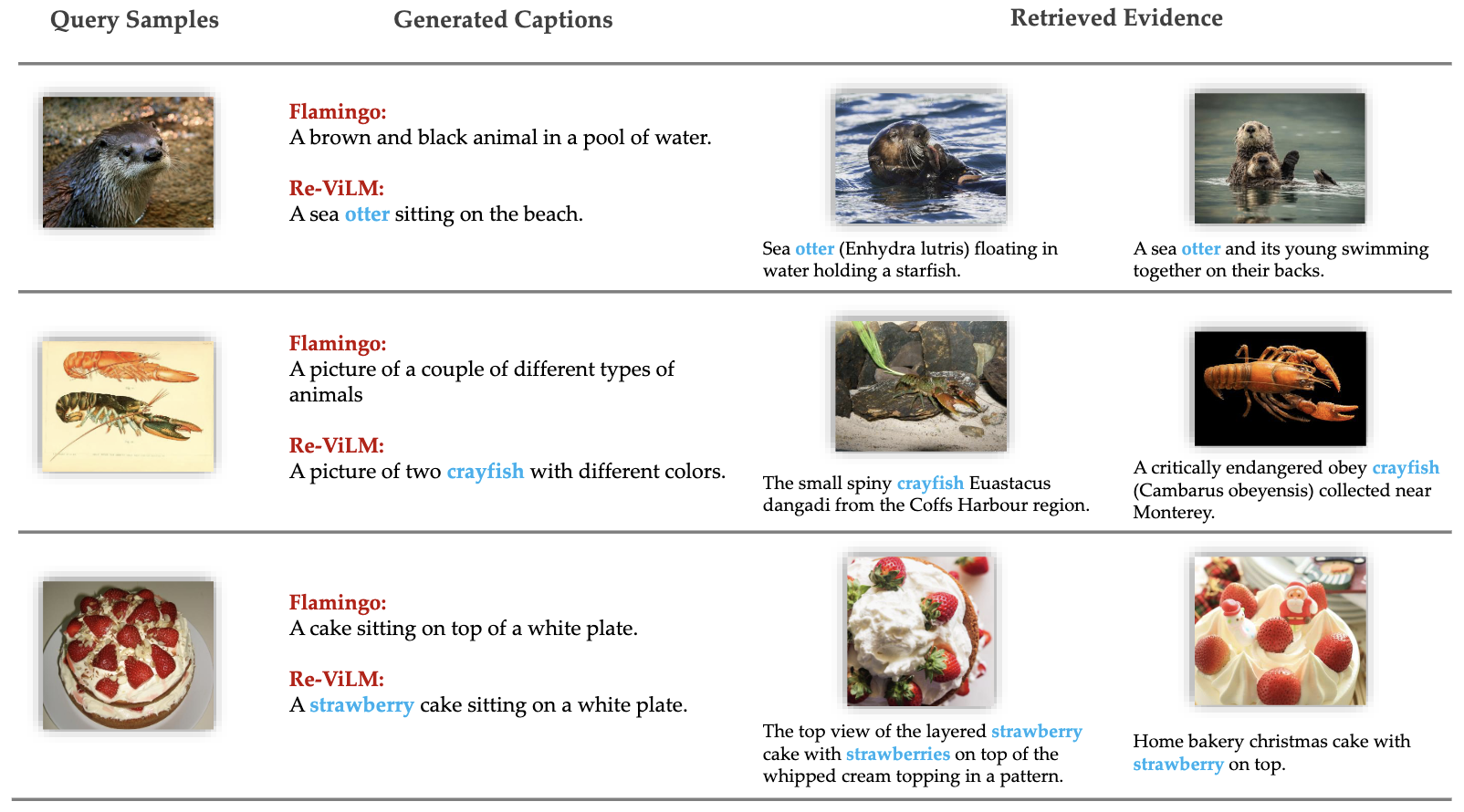
Re-ViLM: Retrieval-Augmented Visual Language Model for Zero and Few-Shot Image Captioning
Conference on Empirical Methods in Natural Language Processing (EMNLP), December 2023
Learning Generalizable Manipulation Policies with Object-Centric 3D Representations
Conference on Robot Learning (CoRL), November 2023
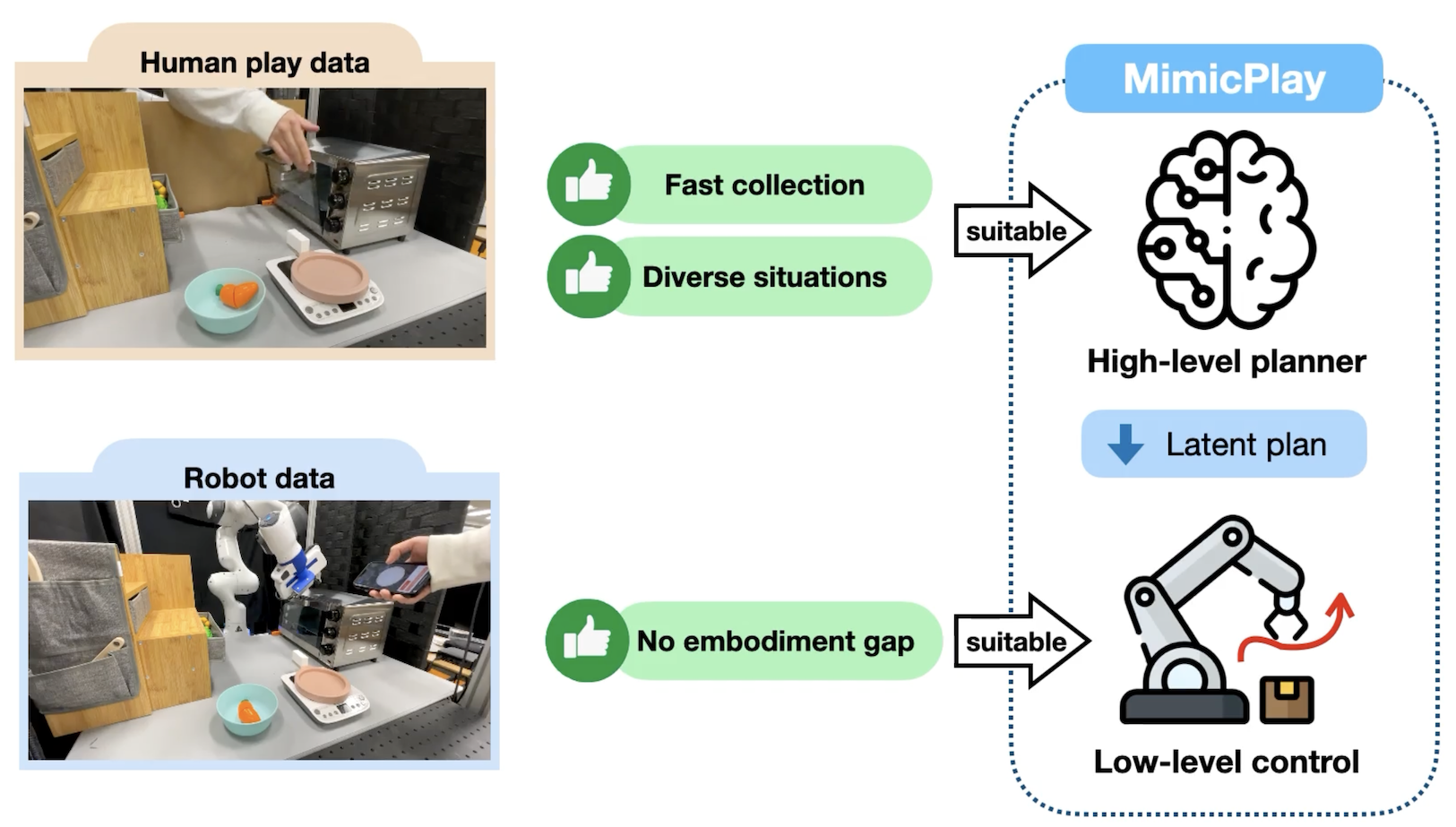
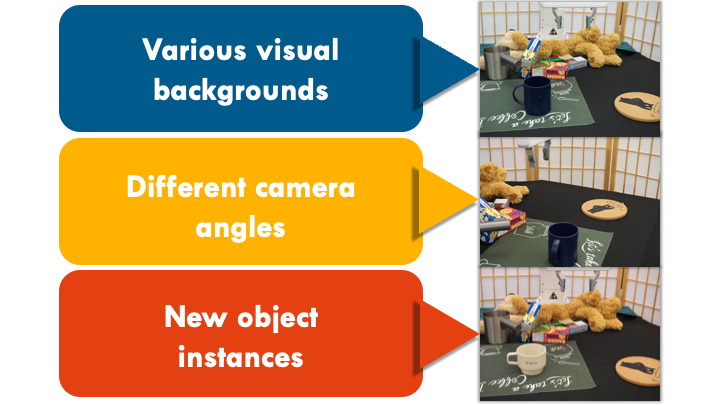
MimicPlay: Long-Horizon Imitation Learning by Watching Human Play
Conference on Robot Learning (CoRL), November 2023
Best Paper Award Finalist
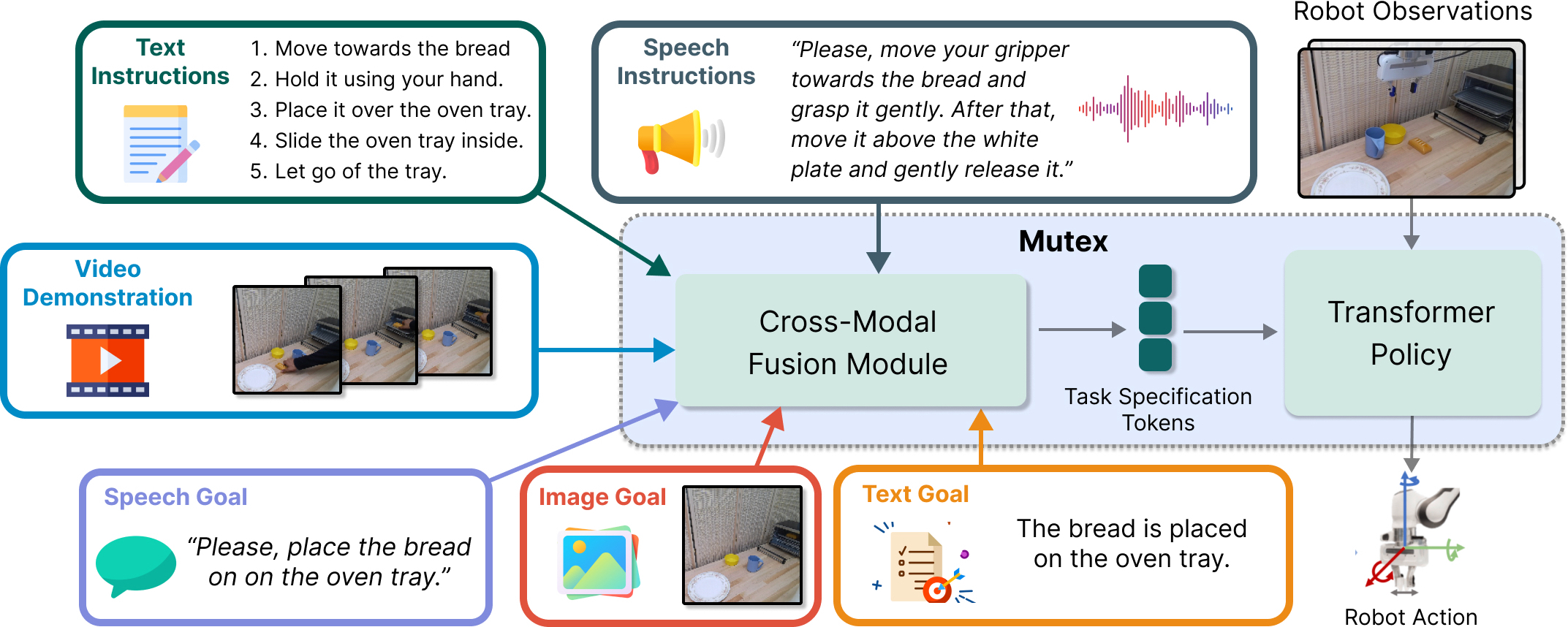
MUTEX: Learning Unified Policies from Multimodal Task Specifications
Conference on Robot Learning (CoRL), November 2023
MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations
Conference on Robot Learning (CoRL), November 2023
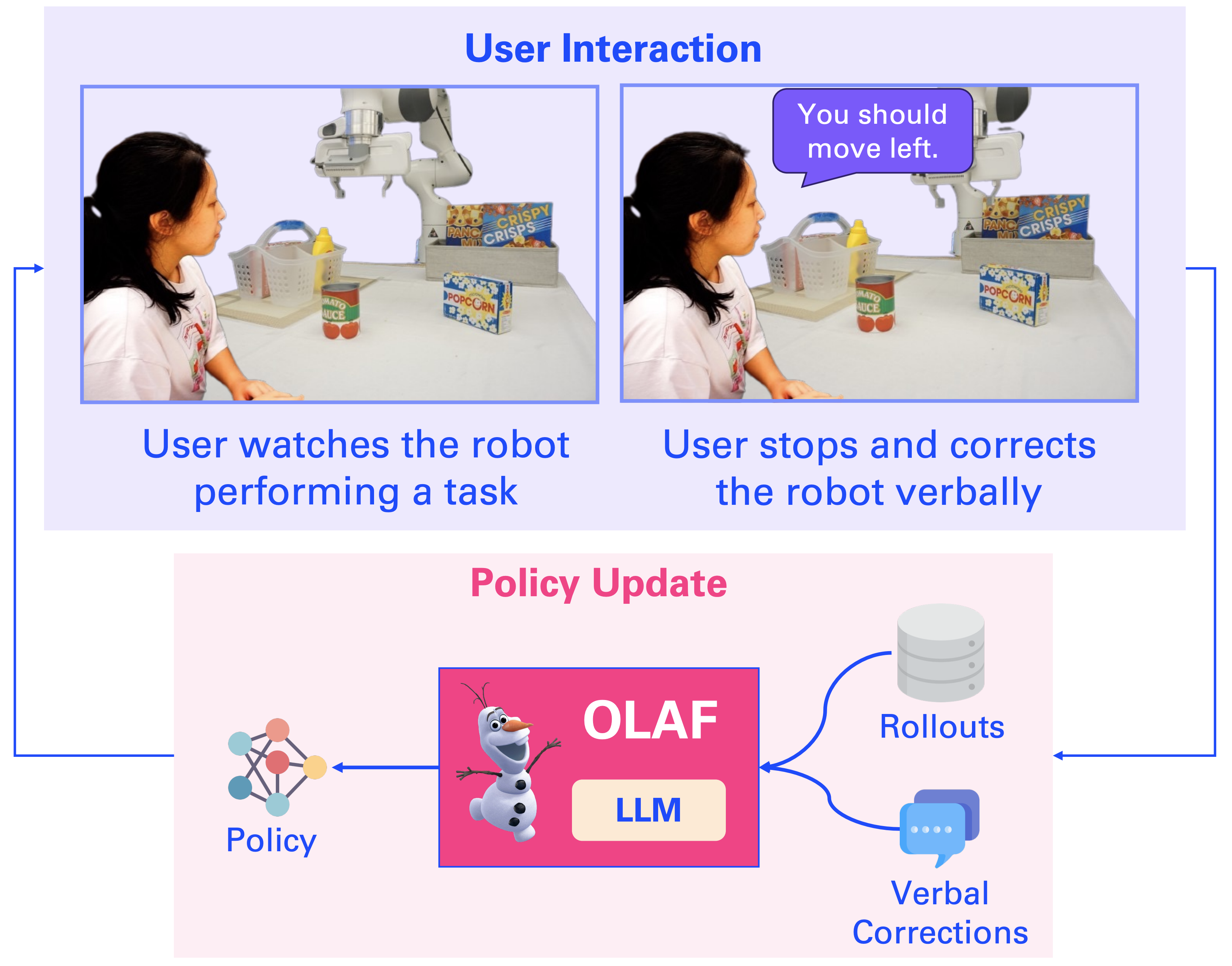
Interactive Robot Learning from Verbal Correction
CoRL Workshop on Language and Robot Learning (LangRob), November 2023
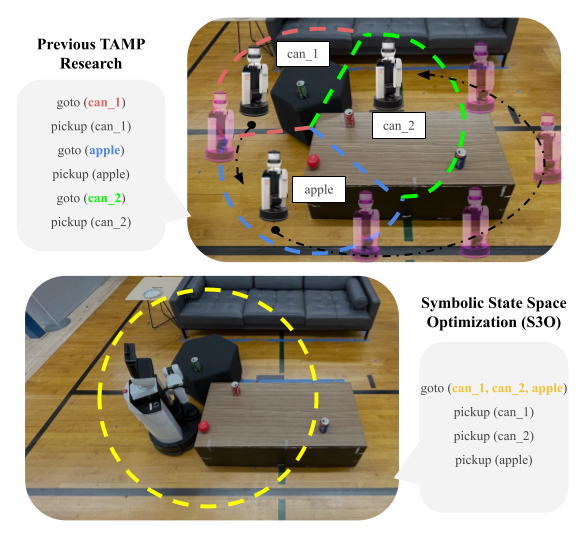
Symbolic State Space Optimization for Long Horizon Mobile Manipulation Planning
International Conference on Intelligent Robots and Systems (IROS), October 2023
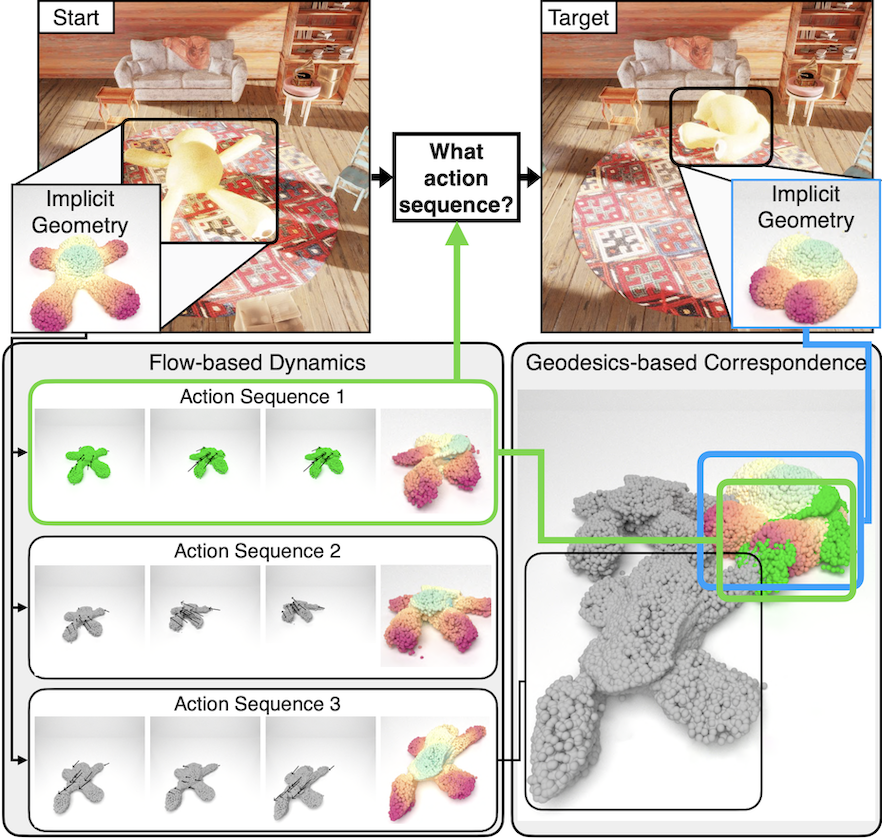
ACID: Action-Conditional Implicit Visual Dynamics for Deformable Object Manipulation
International Journal of Robotics Research (IJRR), July 2023
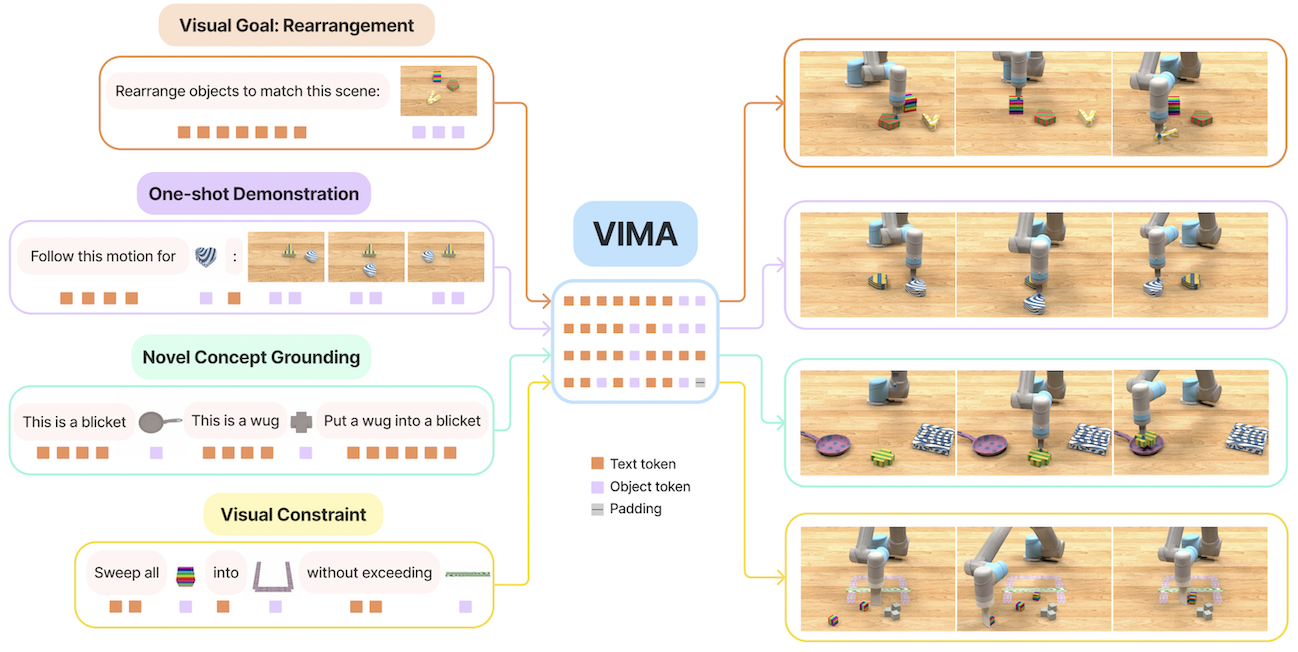
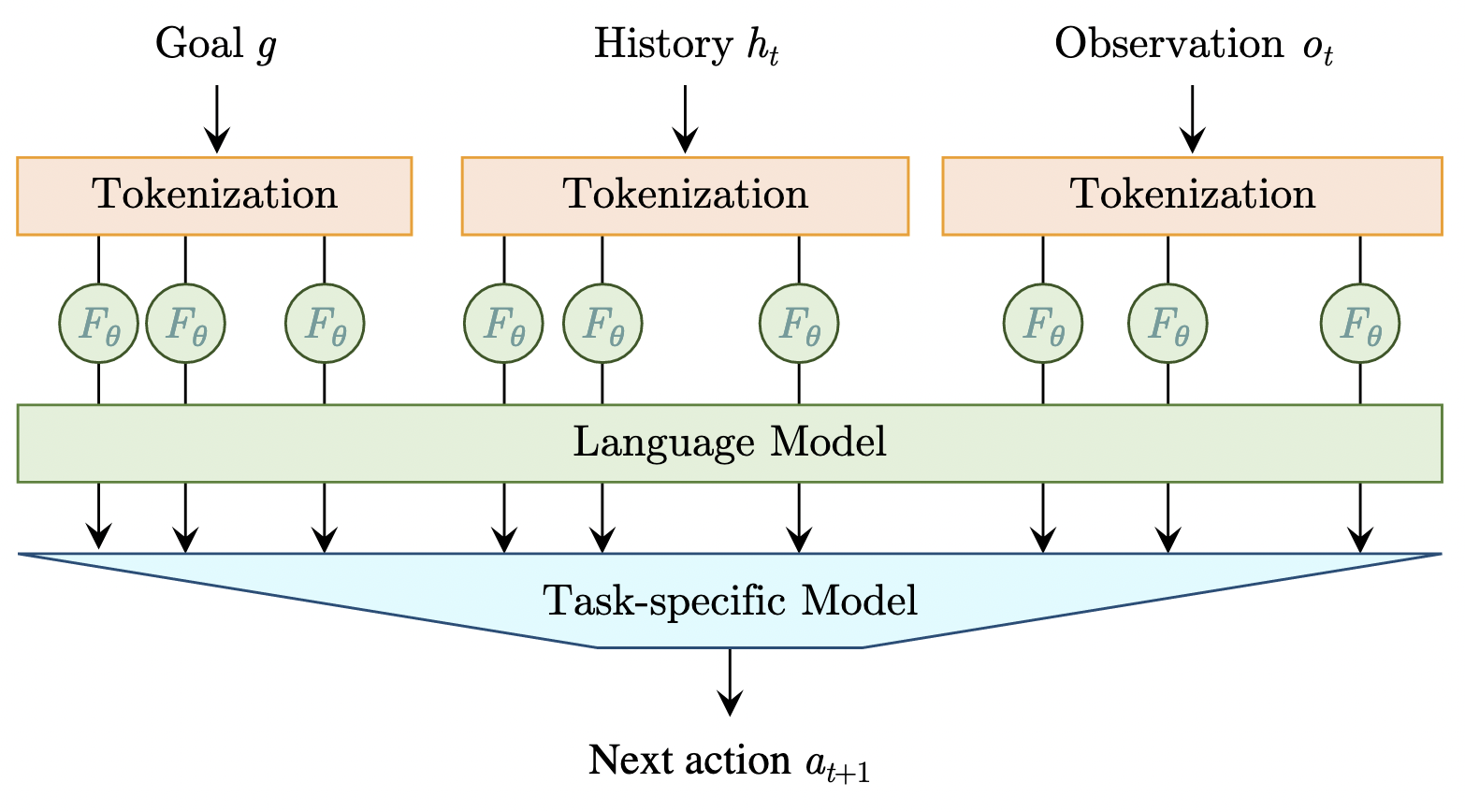
VIMA: General Robot Manipulation with Multimodal Prompts
International Conference on Machine Learning (ICML), July 2023
Robot Learning on the Job: Human-in-the-Loop Autonomy and Learning During Deployment
Robotics: Science and Systems (RSS), July 2023
Best Paper Award Finalist
Fast Monocular Scene Reconstruction with Global-Sparse Local-Dense Grids
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2023
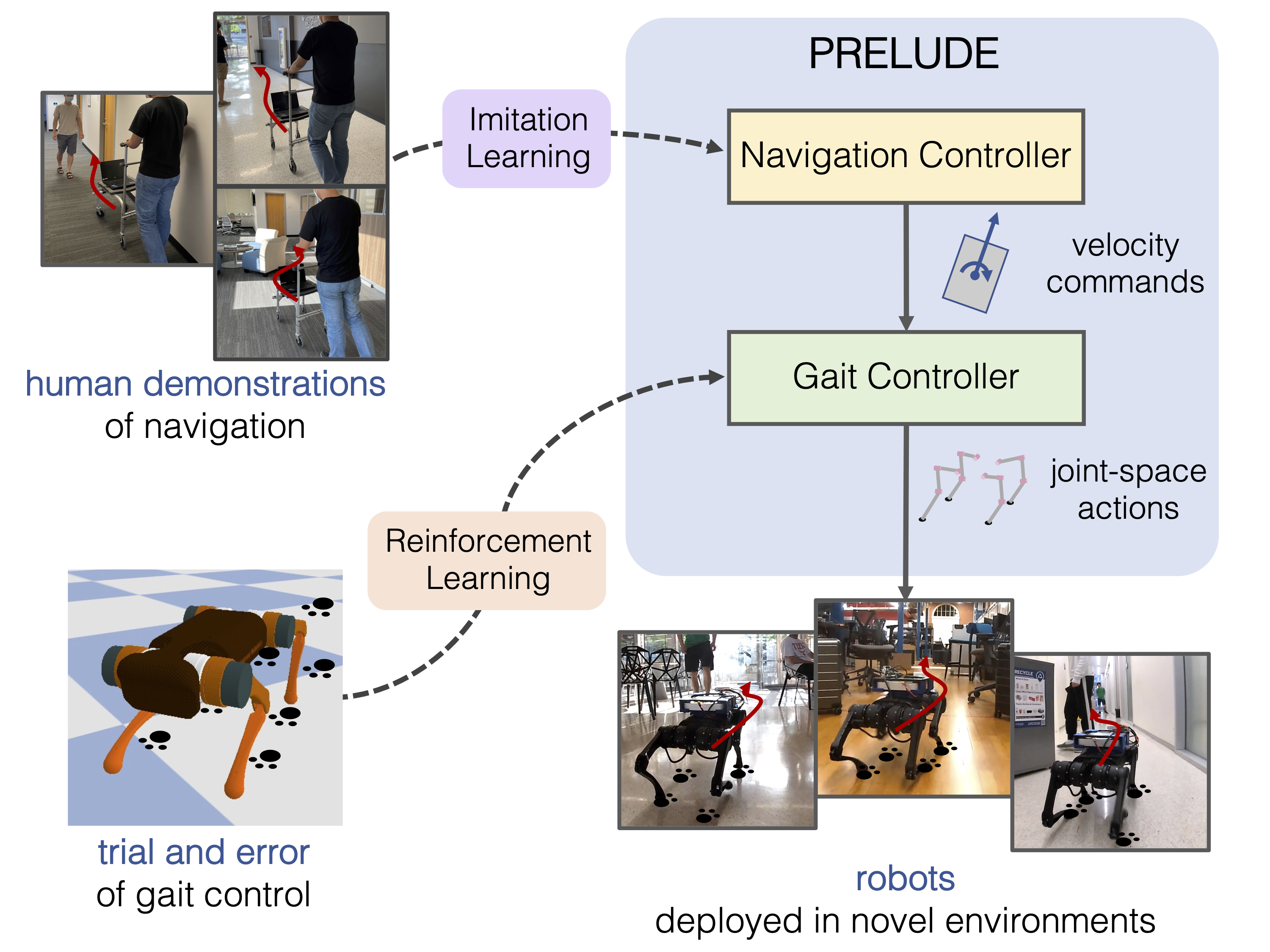
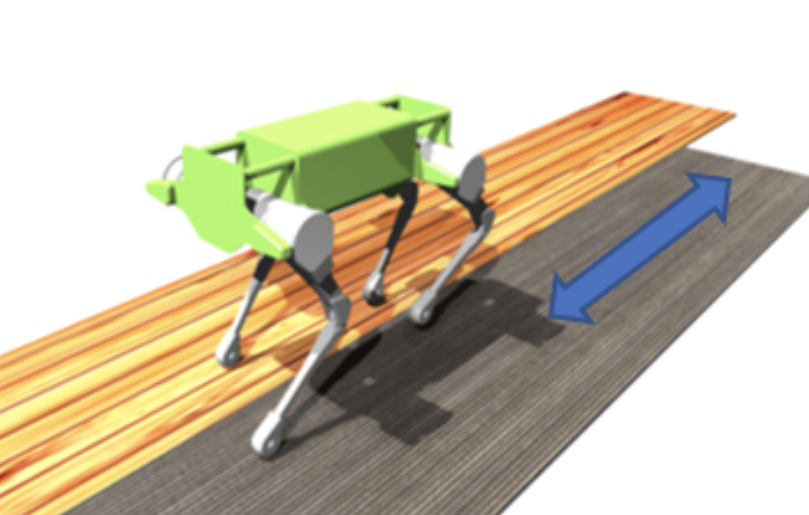
Learning to Walk by Steering: Perceptive Quadrupedal Locomotion in Dynamic Environments
IEEE International Conference on Robotics and Automation (ICRA), May 2023
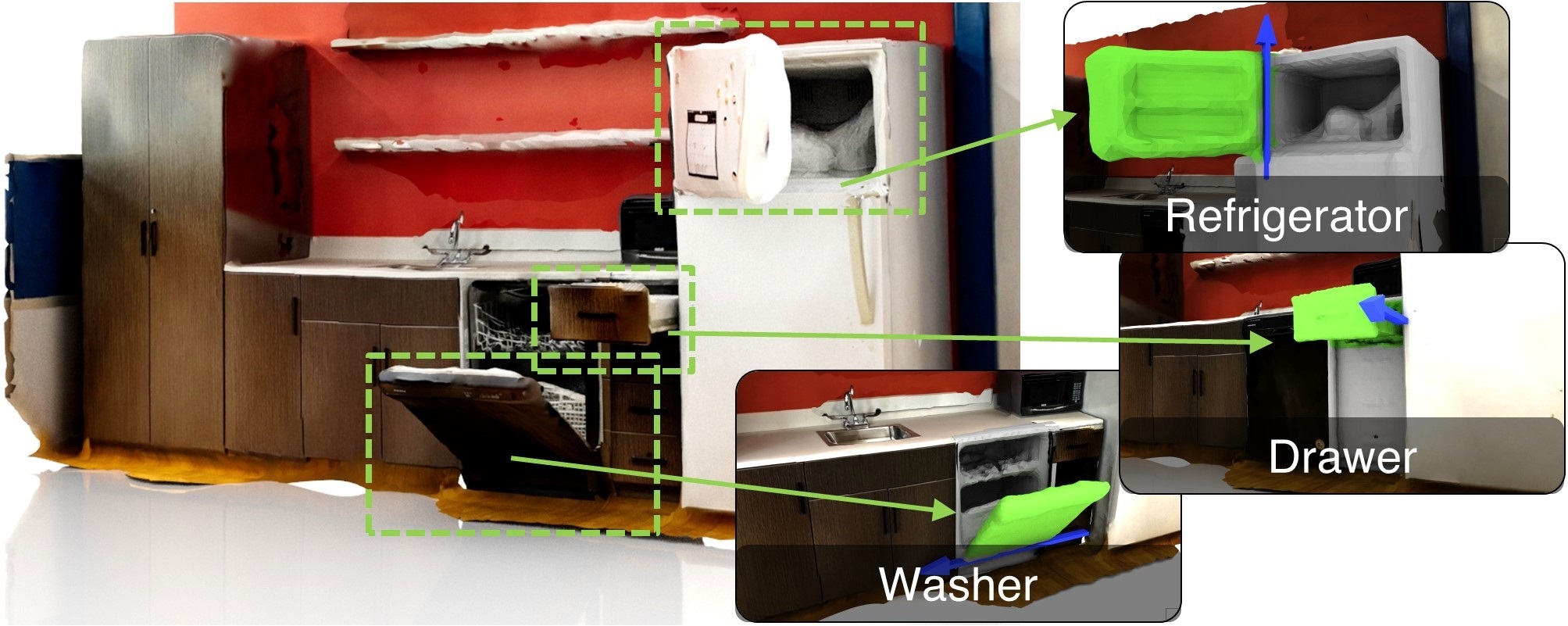
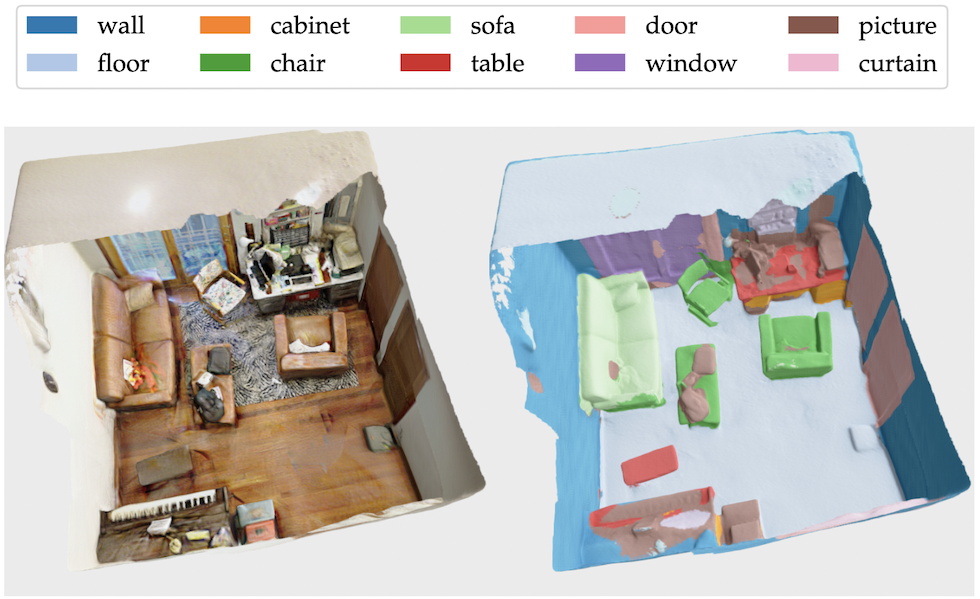
Ditto in the House: Building Articulated Models of Indoor Scenes through Interactive Perception
IEEE International Conference on Robotics and Automation (ICRA), May 2023
2022
VIOLA: Imitation Learning for Vision-Based Manipulation with Object Proposal Priors
Conference on Robot Learning (CoRL), December 2022
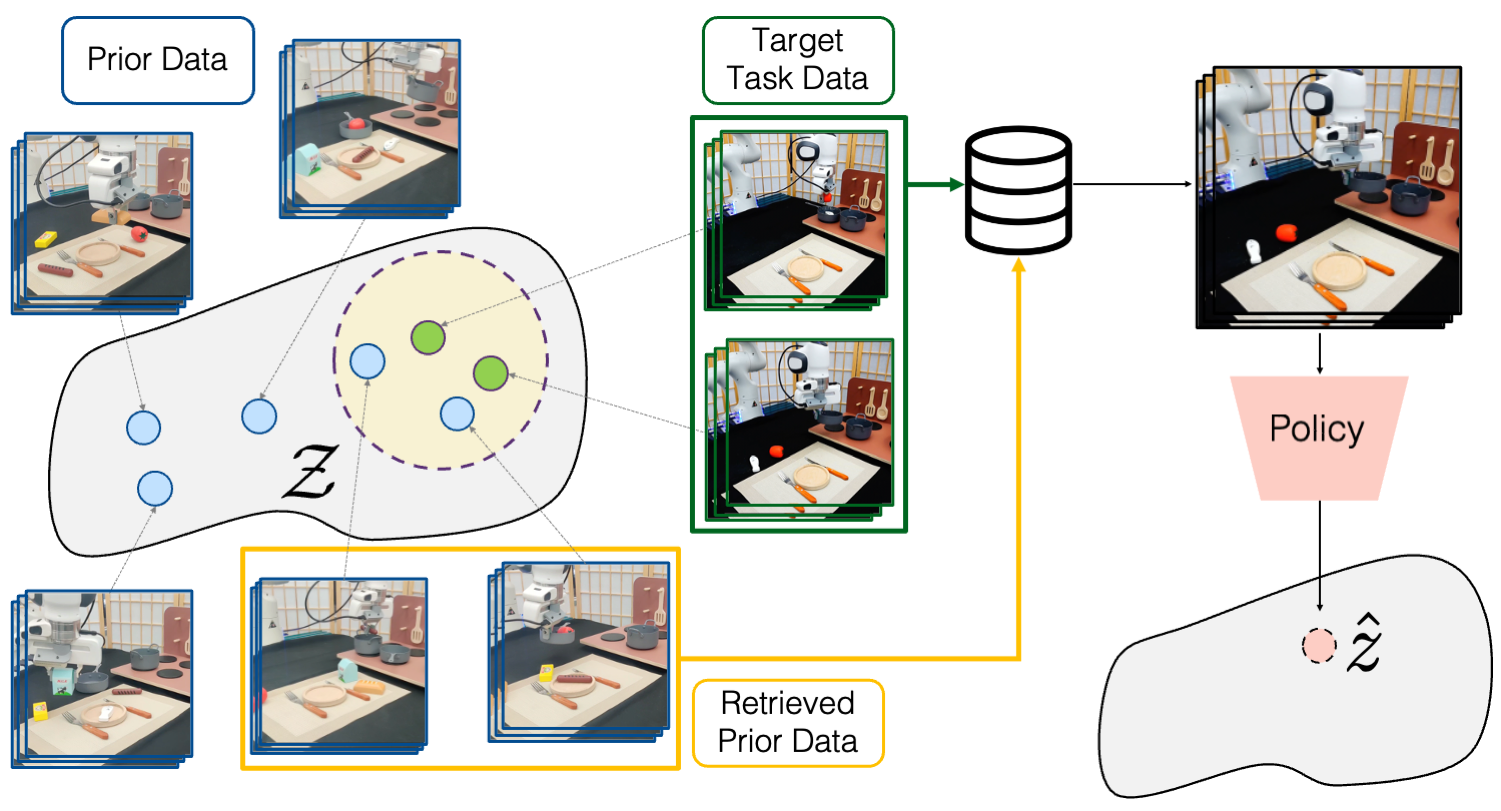
Learning and Retrieval from Prior Data for Skill-based Imitation Learning
Conference on Robot Learning (CoRL), December 2022

MineDojo: Building Open-Ended Embodied Agents with Internet-Scale Knowledge
NeurIPS 2022 Datasets and Benchmarks Track, November 2022
Outstanding Paper Award
Pre-Trained Language Models for Interactive Decision-Making
Conference on Neural Information Processing Systems (NeurIPS), November 2022
Oral Presentation
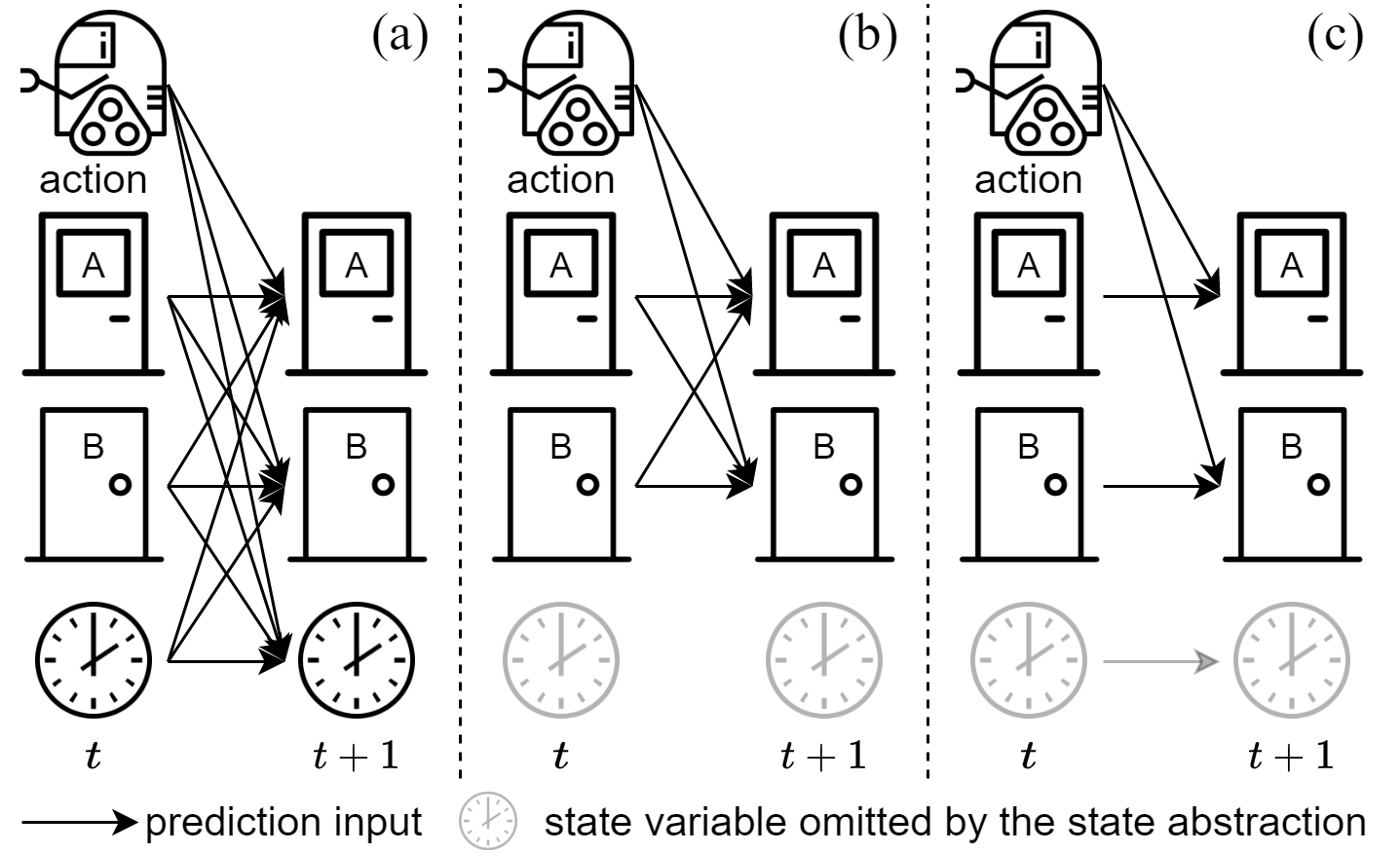
Causal Dynamics Learning for Task-Independent State Abstraction
International Conference on Machine Learning (ICML), July 2022
Long Presentation
ACID: Action-Conditional Implicit Visual Dynamics for Deformable Object Manipulation
Robotics: Science and Systems (RSS), June 2022
Best Student Paper Award Finalist
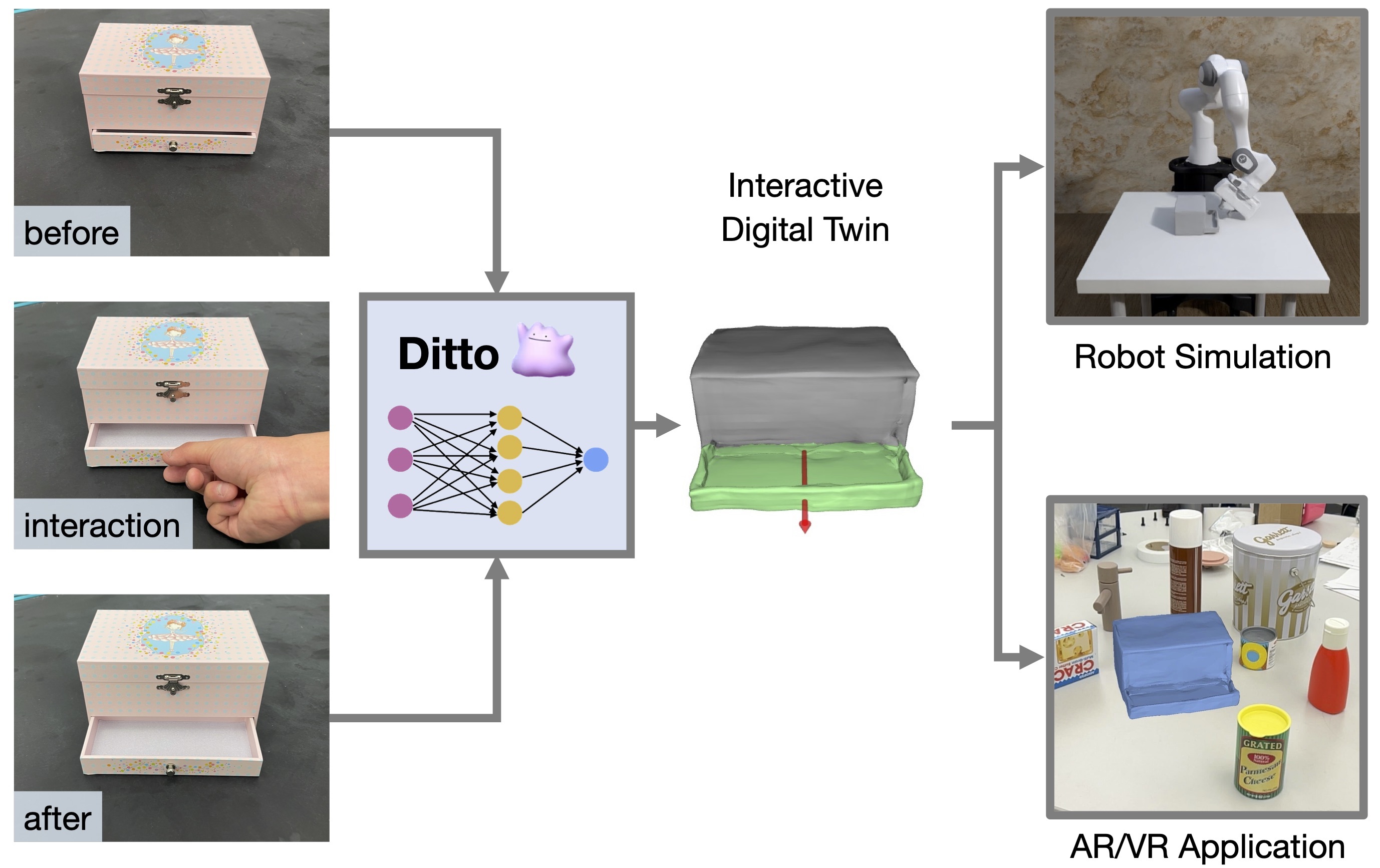
Ditto: Building Digital Twins of Articulated Objects from Interaction
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2022
Oral Presentation
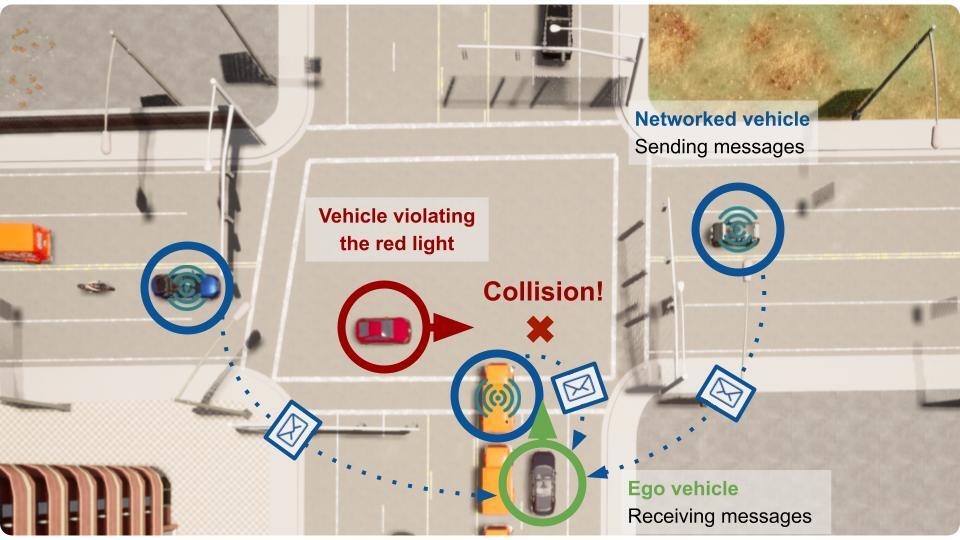
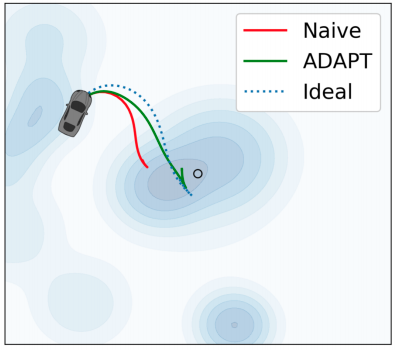
COOPERNAUT: End-to-End Driving with Cooperative Perception for Networked Vehicles
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2022

Bongard-HOI: Benchmarking Few-Shot Visual Reasoning for Human-Object Interactions
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2022
Oral Presentation
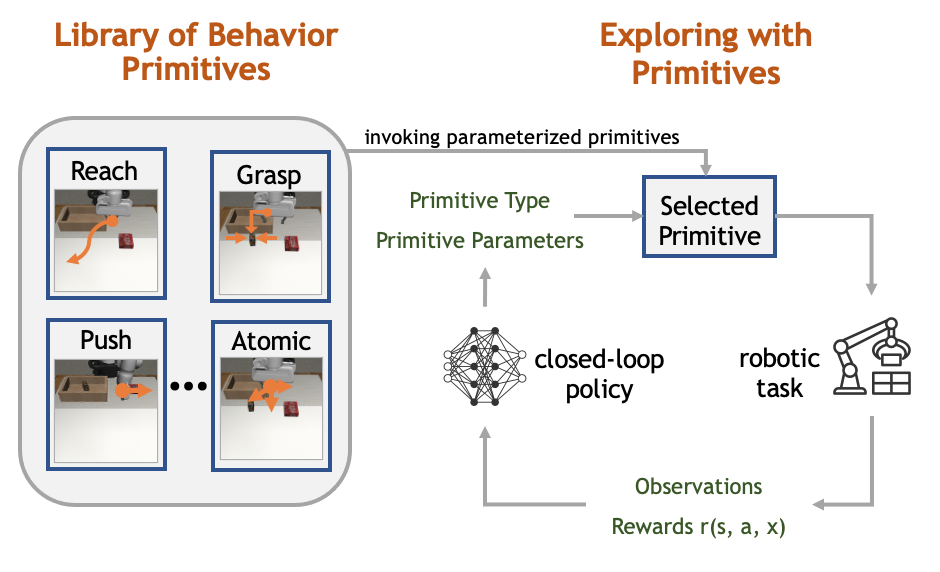
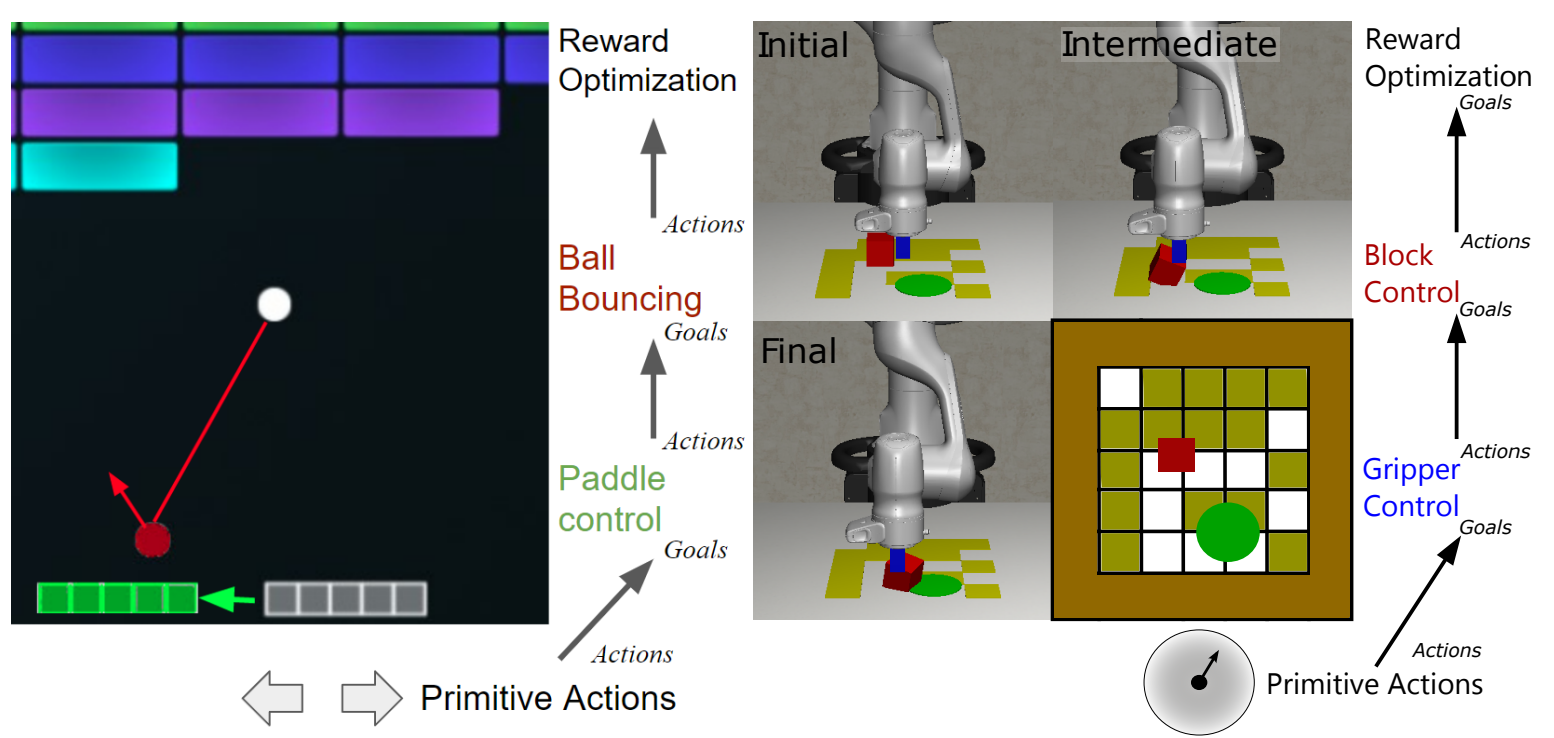
Augmenting Reinforcement Learning with Behavior Primitives for Diverse Manipulation Tasks
IEEE International Conference on Robotics and Automation (ICRA), May 2022
Outstanding Learning Paper Award
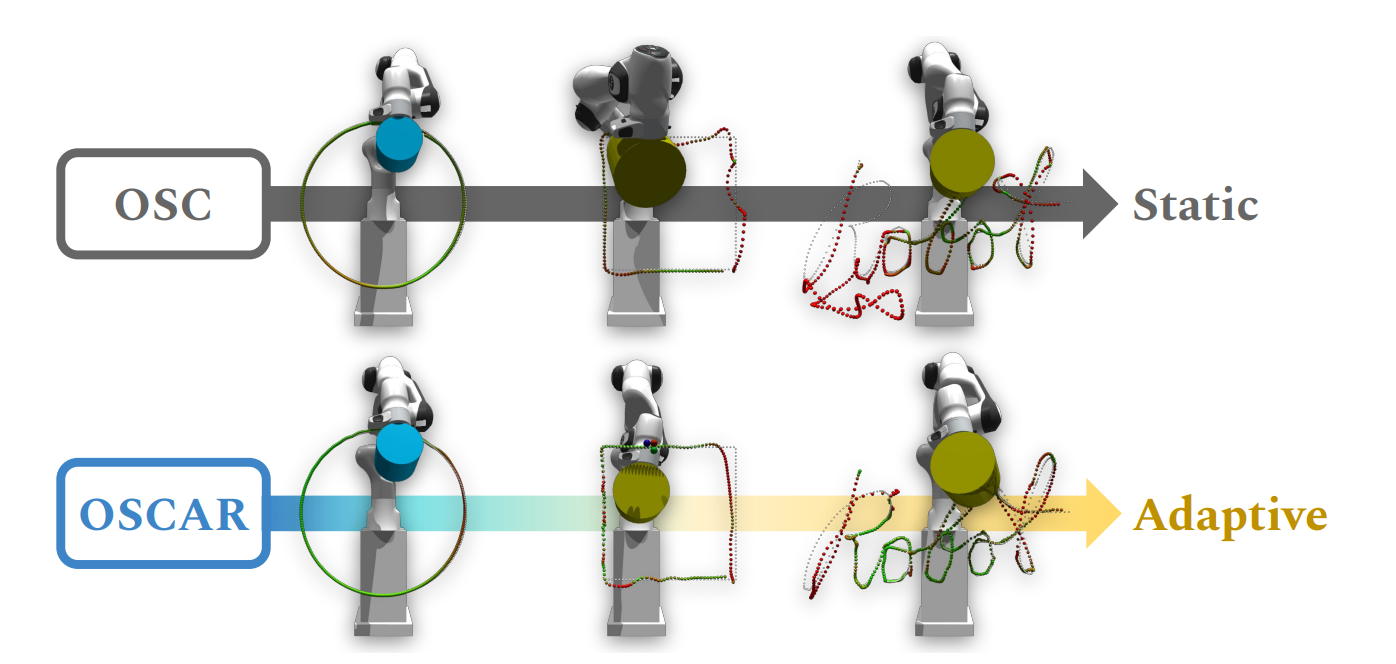
OSCAR: Data-Driven Operational Space Control for Adaptive and Robust Robot Manipulation
IEEE International Conference on Robotics and Automation (ICRA), May 2022
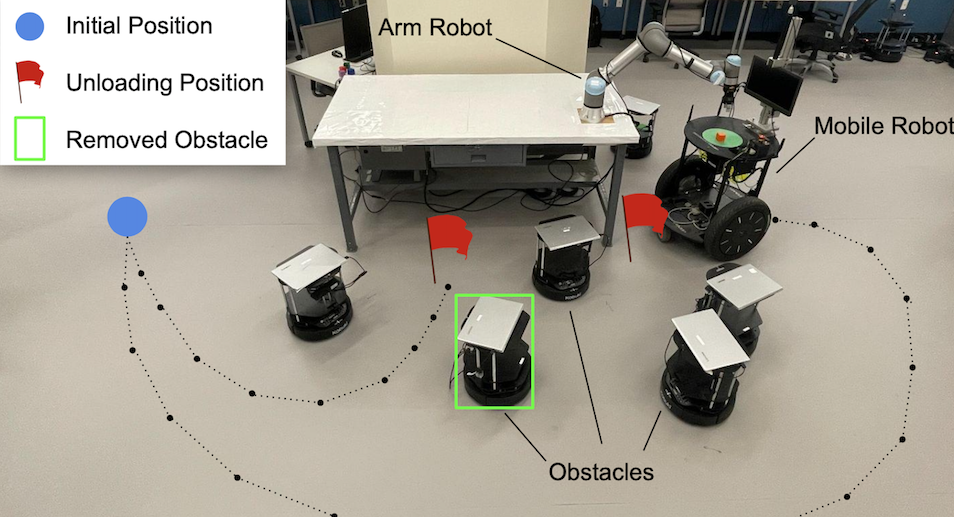
Visually Grounded Task and Motion Planning for Mobile Manipulation
IEEE International Conference on Robotics and Automation (ICRA), May 2022
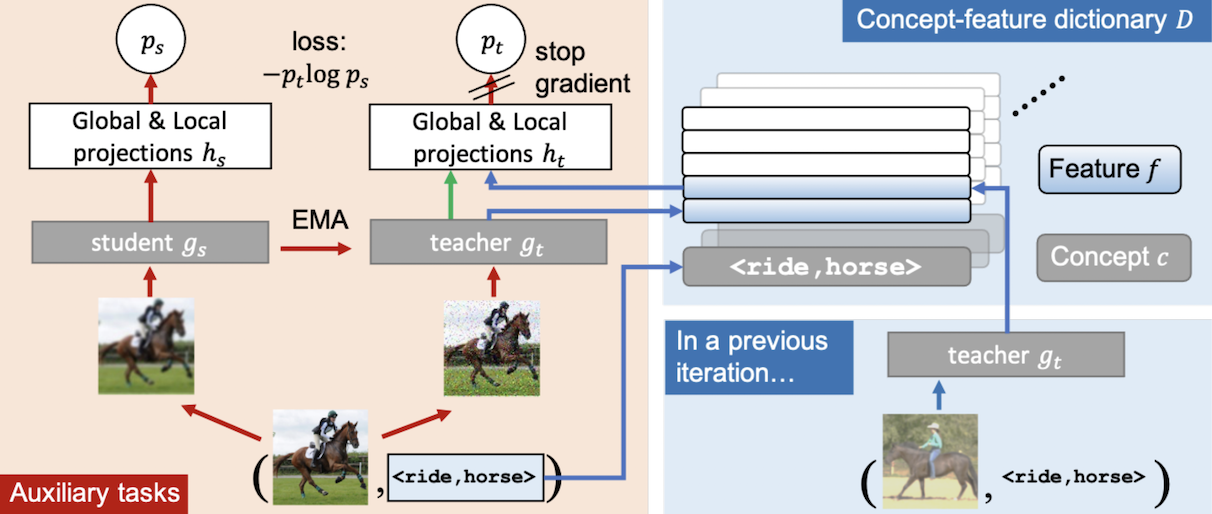
RelViT: Concept-Guided Vision Transformer for Visual Relational Reasoning
International Conference on Learning Representations (ICLR), April 2022

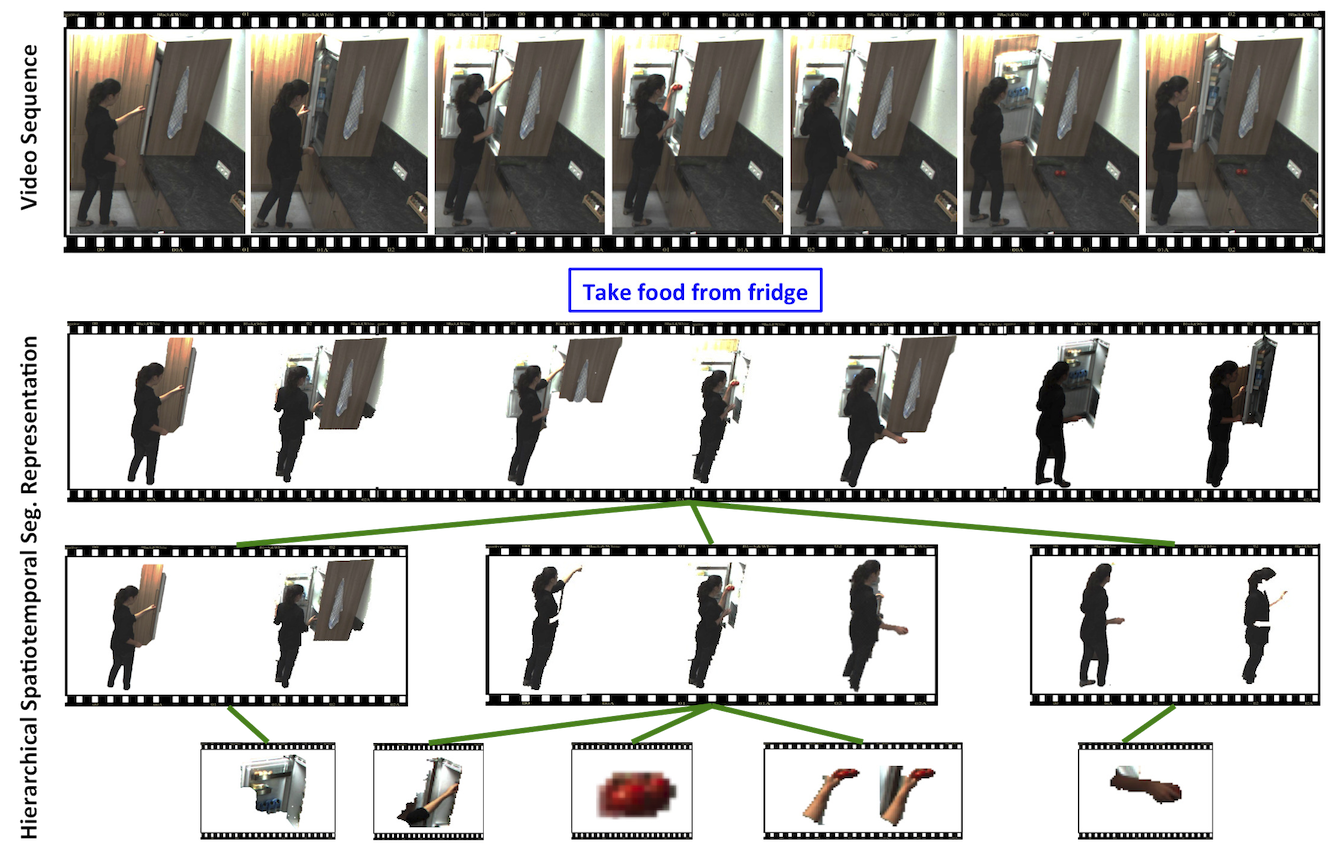
Bottom-Up Skill Discovery from Unsegmented Demonstrations for Long-Horizon Robot Manipulation
IEEE Robotics and Automation Letters (RA-L), January 2022