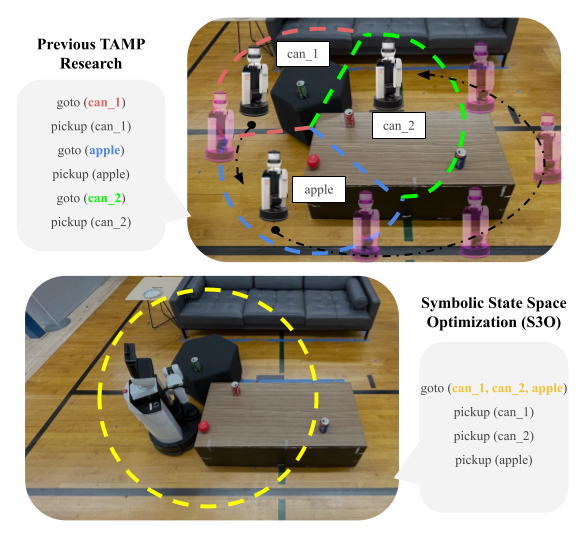
In existing task and motion planning (TAMP) research, it is a common assumption that experts manually specify the state space for task-level planning. A well-developed state space enables the desirable distribution of limited computational resources between task planning and motion planning. However, developing such task-level state spaces can be non-trivial in practice. In this paper, we consider a long horizon mobile manipulation domain including repeated navigation and manipulation. We propose Symbolic State Space Optimization (S3O) for computing a set of abstracted locations and their 2D geometric groundings for generating task-motion plans in such domains. Our approach has been extensively evaluated in simulation and demonstrated on a real mobile manipulator working on clearing up dining tables. Results show the superiority of the proposed method over TAMP baselines in task completion rate and execution time.