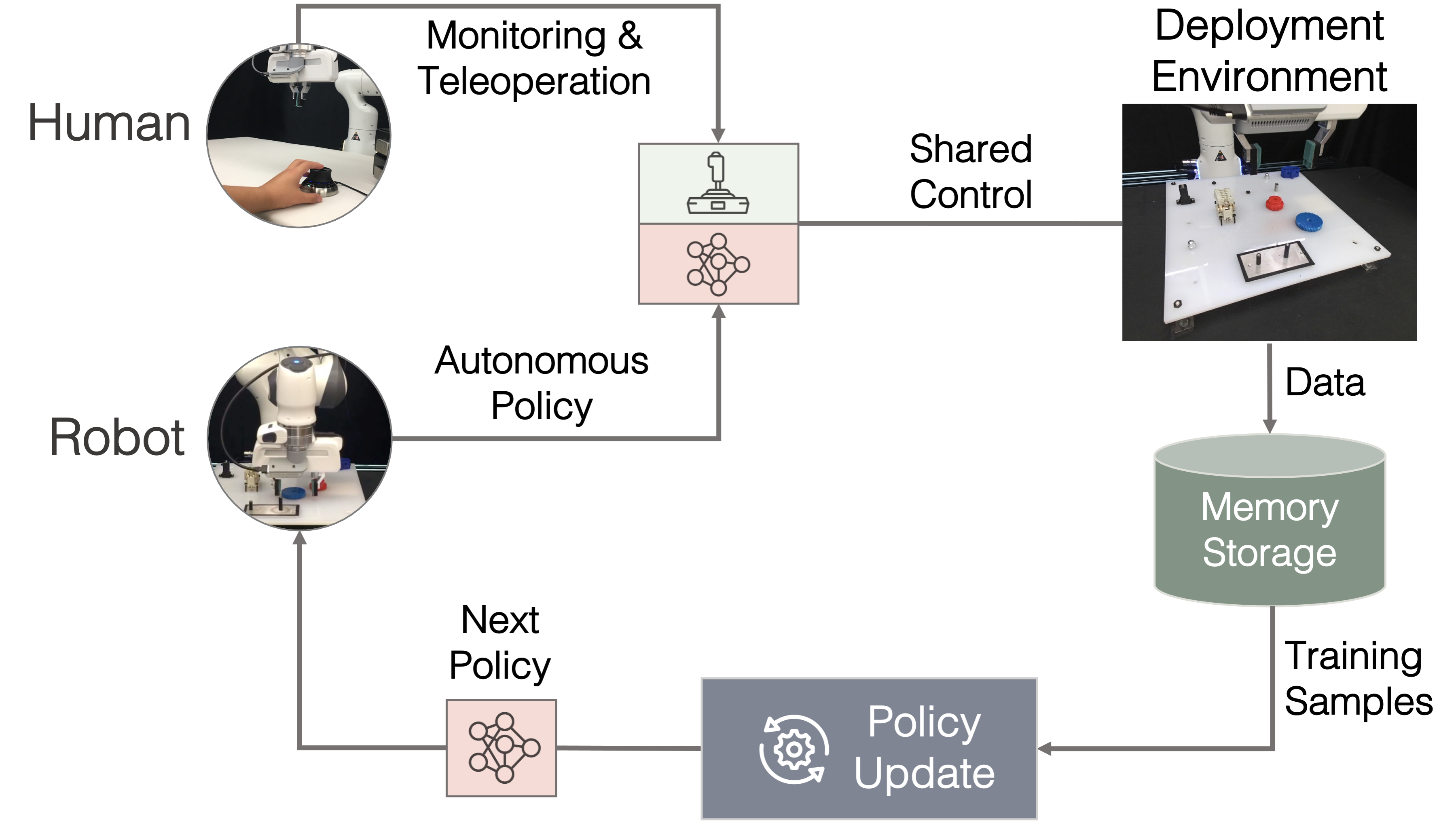
With the rapid growth of computing powers and recent advances in deep learning, we have witnessed impressive demonstrations of novel robot capabilities in research settings. Nonetheless, these learning systems exhibit brittle generalization and require excessive training data for practical tasks. To harness the capabilities of state-of-the-art robot learning models while embracing their imperfections, we present Sirius, a principled framework for humans and robots to collaborate through a division of work. In this framework, partially autonomous robots are tasked with handling a major portion of decision-making where they work reliably; meanwhile, human operators monitor the process and intervene in challenging situations. Such a human-robot team ensures safe deployments in complex tasks. Further, we introduce a new learning algorithm to improve the policy’s performance on the data collected from the task executions. The core idea is re-weighing training samples with approximated human trust and optimizing the policies with weighted behavioral cloning. We evaluate Sirius in simulation and on real hardware, showing that Sirius consistently outperforms baselines over a collection of contact-rich manipulation tasks, achieving 8% boost in simulation and 27% on real hardware than the state-of-the-art methods, with 3 times faster convergence and 15% memory size.