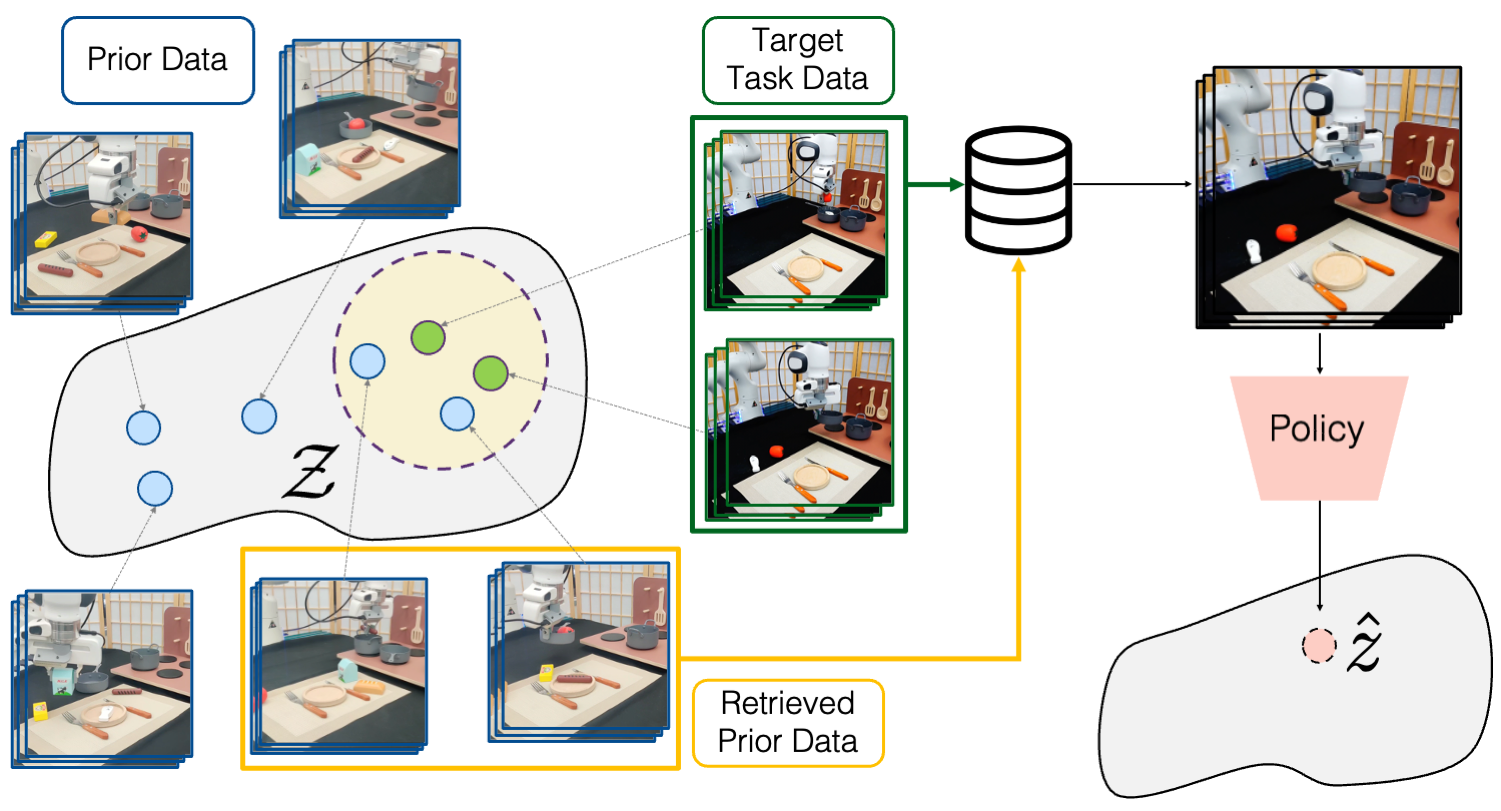
Imitation learning offers a promising path for robots to learn general-purpose behaviors, but traditionally has exhibited limited scalability due to high data supervision requirements and brittle generalization. Inspired by recent advances in multi-task imitation learning, we investigate the use of prior data from previous tasks to facilitate learning novel tasks in a robust, data-efficient manner. To make effective use of the prior data, the robot must internalize knowledge from past experiences and contextualize this knowledge in novel tasks. To that end, we develop a skill-based imitation learning framework that extracts temporally extended sensorimotor skills from prior data and subsequently learns a policy for the target task that invokes these learned skills. We identify several key design choices that significantly improve performance on novel tasks, namely representation learning objectives to enable more predictable skill representations and a retrieval-based data augmentation mechanism to increase the scope of supervision for policy training. On a collection of simulated and real-world manipulation domains, we demonstrate that our method significantly outperforms existing imitation learning and offline reinforcement learning approaches. Videos and code are available at https://ut-austin-rpl.github.io/sailor/