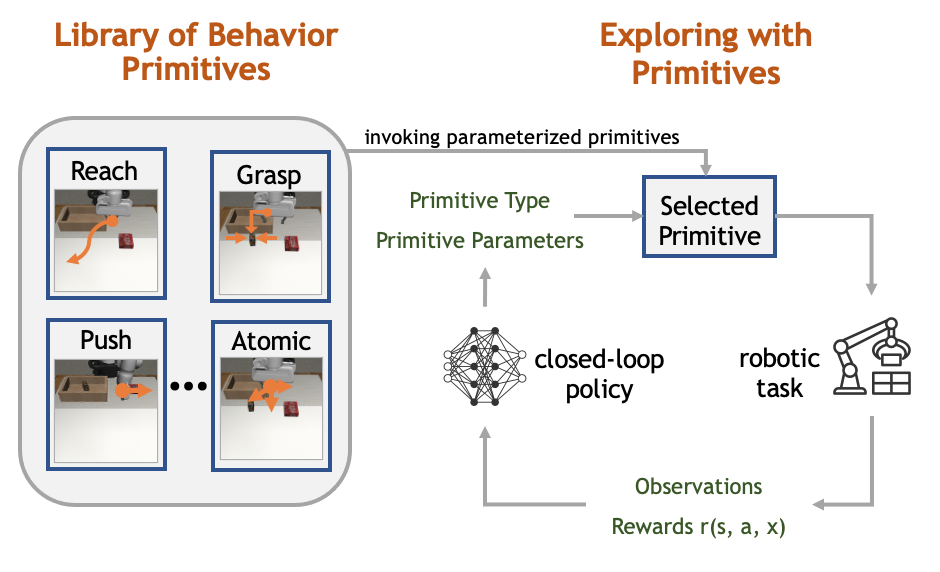
Realistic manipulation tasks require a robot to interact with an environment with a prolonged sequence of motor actions. While deep reinforcement learning methods have recently emerged as a promising paradigm for automating manipulation behaviors, they usually fall short in long-horizon tasks due to the exploration burden. This work introduces MAnipulation Primitive-augmented reinforcement LEarning (MAPLE), a learning framework that augments standard reinforcement learning algorithms with a pre-defined library of behavior primitives. These behavior primitives are robust functional modules specialized in achieving manipulation goals, such as grasping and pushing. To use these heterogeneous primitives, we develop a hierarchical policy that involves the primitives and instantiates their executions with input parameters. We demonstrate that MAPLE outperforms baseline approaches by a significant margin on a suite of simulated manipulation tasks. We also quantify the compositional structure of the learned behaviors and highlight our method’s ability to transfer policies to new task variants and to physical hardware.