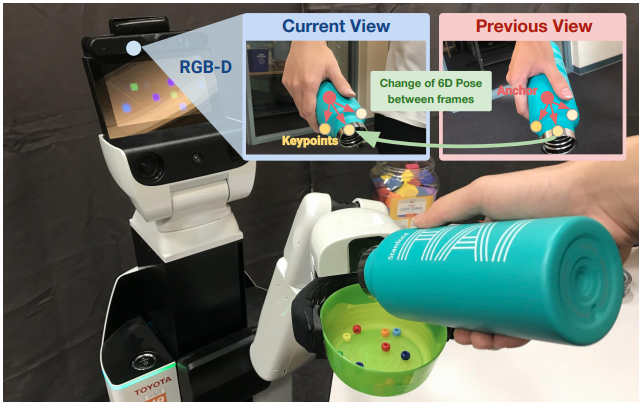
We present 6-PACK, a deep learning approach to category-level 6D object pose tracking on RGB-D data. Our method tracks in real-time novel object instances of known object categories such as bowls, laptops, and mugs. 6-PACK learns to compactly represent an object by a handful of 3D keypoints, based on which the interframe motion of an object instance can be estimated through keypoint matching. These keypoints are learned end-to-end without manual supervision in order to be most effective for tracking. Our experiments show that our method substantially outperforms existing methods on the NOCS category-level 6D pose estimation benchmark and supports a physical robot to perform simple vision-based closed-loop manipulation tasks.